
1 引言
自主式移動機器人集機械、電子、檢測技術與智能控制于一體IlJ。是目前國際機器人研究的熱點。基于移動速度和方向易于控制,輪式移動機器人是最為常見的移動機器人。移動機器人研究的重要課題就是:機器人向目標方向移動中,能夠自動按照地面的導引線到達某一標志物并完成相應動作。針對這一課題近年來電子競賽中都有機器人自動尋導引線行走的題目翻。這也是移動機器人的標準問題之一,是解決移動機器人在自由環境自主行動的基礎。
以前尋線機器人設計中,其尋線控制系統一般采用如下方式:尋線傳感器信號直接輸入至控制器判斷是否偏離導引線,通過控制左右驅動輪的轉速差調整機器人在引導線上的位置,這種方法控制實現簡單,但機器人在引導線上將“搖擺”前進,針對傳統尋線系統這一缺點,基于模糊控制思想,這里設計一種新型基于多傳感器信息融合的尋線控制系統,使尋線機器人可以平穩地按照引導線行走。
2 傳感器結構
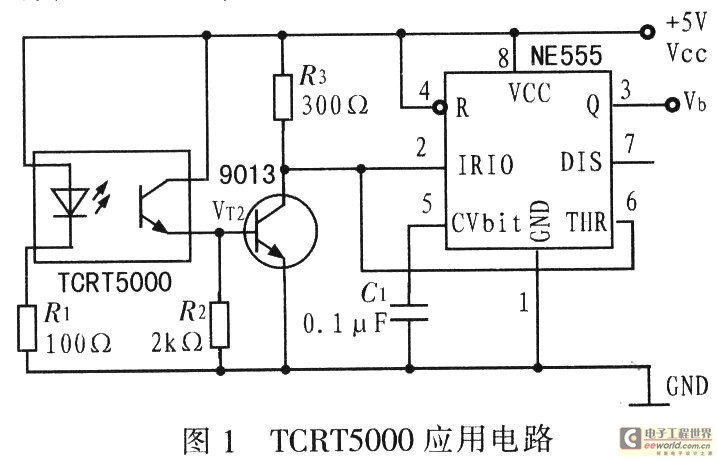
尋線傳感器技術主要是利用黑白兩種顏色對光的反射程度不同,采用發光二極管和光電三極管組成反射式傳感器檢測黑色導引線信息。本文用反射式光電傳感器TCRT5000組成尋線傳感器模塊,其應用電路如圖1所示。
改進尋線控制系統主要是對傳感器模塊的結構以及安裝形式相應調整。傳統的尋線傳感器一般由3路或4路反射式光電傳感器組成,結構簡單,但對導引線信息量獲取不足。該尋線傳感器模塊采用8路反射式光電傳感器,車體前端和后端各裝一個傳感器模塊。
3 模糊控制系統設計
模糊推理是對人腦邏輯推理能力的一種近似模擬,它首先通過模糊集和隸屬度函數來描述某事件或現象的模糊性以及不確定性,然后利用領域專家的知識建立模糊規則,通過各種模糊算子進行模糊運算,得出相應的模糊結論,從而實現模糊推理系統的輸入和輸出之間的非線性映射,所以模糊推理實際上是一種不確定的近似推理。利用模糊推理多傳感器信息融合的基本步驟如下:
(1)傳感器選擇根據實際需要,選取適當傳感器進行檢測,獲取研究對象的有關信息,并對其信息進行預處理。
(2)模糊推理系統設計此環節包括模糊隸屬函數和模糊推理規則的確定。按照各種隸屬函數的確定方法,用模糊集和隸屬函數描述傳感器信息;針對具體問題,利用專家的領域知識和經驗確定模糊推理規則。
(3)模糊推理 通過各種模糊邏輯算子,計算每一條規則的結論,其中每條結論代表規則前件對規則的滿足程度。
(4)模糊合成通過上一步模糊推理,每條模糊規則都得到一個模糊結論,模糊合成是對模糊結論的綜合處理,最后得出總的結論。
(5)反模糊化通過各種反模糊化算法,將模糊推理融合的結果即模糊集隸屬函數轉化為一個精確值。
機器人的自主尋線行走是利用尋線傳感器檢測機器人偏離導引線的位置,即利用機器人的姿態偏差值調整左右驅動電機的行進速度,從而調整尋線機器人的運行軌跡,使其沿著導引線運行。此特點恰好符合模糊控制的思想,所以機器人尋線系統控制器可以采用模糊控制器。
本模糊控制系統有兩個輸入變量,分別是前后尋線傳感器模塊檢測到的引導線信息,即iF,iB。模糊控制系統輸出為左右驅動電機的速度差,即通過調整兩個驅動電機的速度差來調整機器人在導引線上的轉角。
根據尋線傳感器的配置方式,對前后尋線傳感器每一路進行編號,并按照尋線傳感器檢測到機器人相對導引線的姿態偏差,將傳感器的輸出轉換為16進制的偏差輸出值,傳感器編號如表1所示。

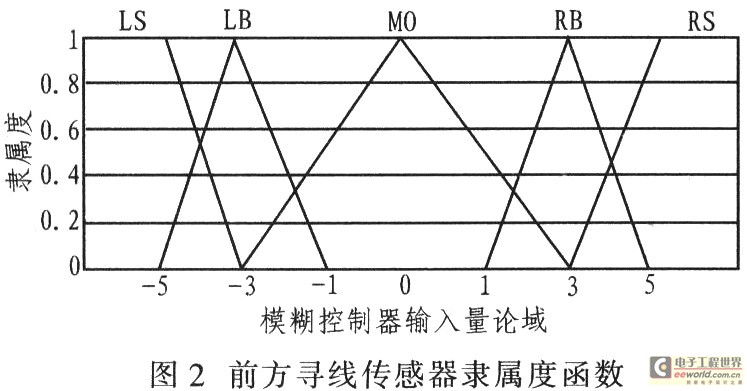
模糊控制器的輸入量的語言值模糊子集確定為{LB,LS,MD,RS,RB}。其中:LB=左大;LS=左小;MD=中心;RS=有小;RB=右大。設定模糊控制器輸入量論域為{一5,一3,一1,O,1,3,5},定義前方傳感器模塊(iF)的隸屬度函數如圖2所示(iB隸屬度函數與iF相同)。為計算簡單,本研究采用線性函數,從而減少控制器的計算負擔,提高數據處理速度。
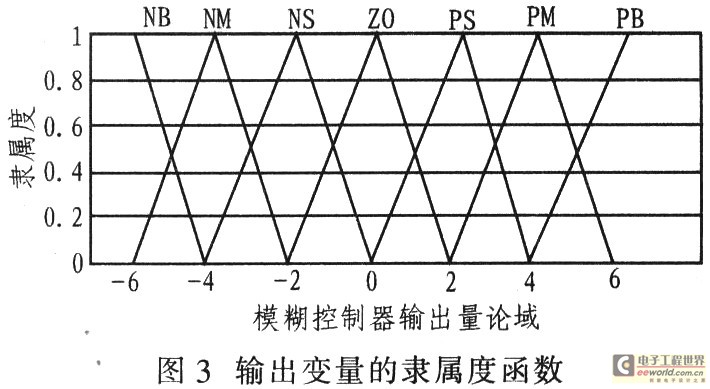
輸出量語言值模糊子集選取為:{NB,NM,NS,ZO,PS,PM,PB}。其中:NB=負大;NM=負中;NS=負小;Z0=零;PS=正小;PM=正中;PB=正大。設定模糊控制器的輸入量論域為[一6,一4,一2,0,2,4,6],定義輸出變量(OUT)的隸屬度函數(圖3)。
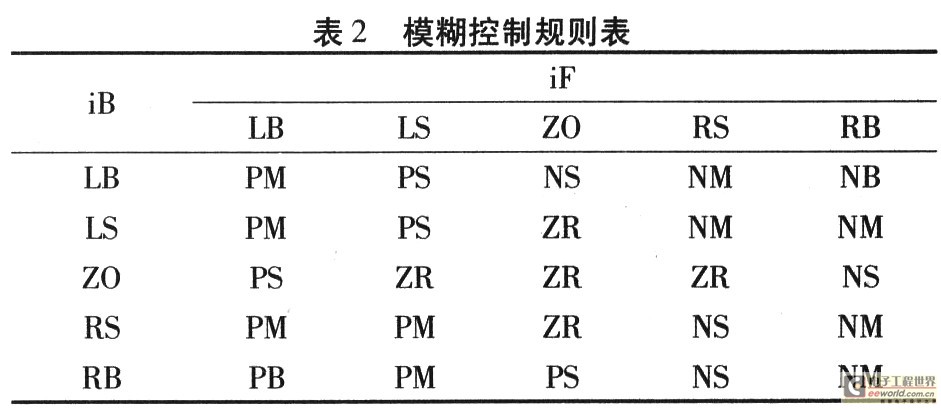
由表2得到的輸出結果是模糊量,模糊量一般不能直接控制被控對象,所以還需反模糊化。常用反模糊化法有最大隸屬度法、加權平均法、中位數法等。由于最大隸屬度法簡單易行,且算法的實時性好,故最后應用最大隸屬度法對控制規則表進行反模糊化處理,即針對每一個模糊控制器輸出得到一個左右驅動輪的速度差。
反模糊化處理后的數據不能直接應用于程序中,理論上得到的反模糊化結果和實際調整效果之間還有一定偏差,該偏差需多次試驗來修正,即修正機器人左右控制輪的速度差,經多次試驗最后得到控制程序段,其核心程序代碼如下:
Motor(1,1700,1,1400,1,0);//電機驅動函數(左輪正反轉控制,左輪速度,右輪正反轉控制,右輪速度,調整時間,系統控制)
case 0x18:
……
case 0x01:
……
case 0x02:
…… }
4 結束語
結合近年來電子設計大賽作品,深入分析傳統尋線控制系統的不足,在改進硬件設計的基礎上,提出將模糊控制算法引入移動機器人尋線控制系統的設想,并在模糊控制理論的基礎上加以實現,開發一種新型尋線機器人模糊控制系統,在由模糊控制得到的相關控制規則的基礎上經多次試驗和修正編寫相應程序,實現了更準確、更平穩的尋線控制,解決了傳統尋線控制的“搖擺”前行問題,取得較理想的效果。