
0 引言
智能車又稱輪式機器人,是集傳感器、計算機、自動控制、通信以及機械等技術于一身的綜合系統。在智能車的設計和制作過程中,控制算法調試是一個極其重要而又關鍵的環節,面臨著許多急需解決的問題:智能車能否按照事先設計的思路運行;控制策略是否符合實際需求;運行中出現問題時,智能車的各項實時參數是什么。針對這些問題,許多學者提出了基于仿真的解決方案。有學者提出基于參數化的機械系統幾何模型,使用拉格朗日方法建立系統動力學方程,來對虛擬機械系統進行動力學分析。但由于車輛機械結構的復雜性,這種建模和仿真方式過于繁瑣,影響了仿真和研究的效率。清華大學針對全國大學生智能車競賽開發的PlaSTid仿真平臺,其動力學模型雖然較為簡單,但該模型是一種理想化的模型,對于影響智能車運行狀況的一些參數的考慮較少,例如小車與路面之間的摩擦系數、小車的機械性能等因素,因而仿真結果與實際存在一定差距。有學者提出一種智能車硬件在環仿真系統,該仿真系統發揮了硬件在環的長處。但該軟件仍以虛擬仿真平臺LabVIEW為基礎,控制算法的分析和決策在上位機上運行,脫離了車模實體的軟件運行環境,其仿真結果與實際也存在一定的差距,因此其應用有相當的局限性。
筆者設計了一種基于無線通信技術的智能車運行狀態實時監控系統。該系統以車模為實驗主體,車載控制器完成智能車的數據采集、分析、決策等。上位機通過無線通信技術獲得車模的各項運行參數,監控車模的運行狀態。
1 系統總體設計
1.1 Zigbee技術分析
Zigbee技術是一種近距離、低功率、低成本的雙向無線通信技術[5-6],工作頻段為全球通用頻段2.4 GHz,數據傳輸速率為10~250 kbit/s,免執照。Zigbee協議由應用層、網絡層、數據鏈路層和物理層組成,其中物理層和鏈路層遵循IEEE802.15.4協議。一個Zigbee網絡支持255個設備;采用先進的AES128加密算法,提供數據完整性檢查;具有載波偵聽多路訪問、沖突檢測(CSMA/CA)方式,有很好的兼容性。Zigbee定義了3種類型的節點設備,分別是協調器、路由設備(FFD)和終端設備(RFD)。
Zigbee網絡由這3種設備組成,但必須包括1個協調器,而且只能有1個協調器。協調器是整個網絡的中心,它負責網絡的組建、網絡節點的管理、網絡節點信息的儲存,尋找節點之間的路由消息,不斷地接收信息。路由設備也擔當著協調器的作用,負責其他的路由器或終端設備入網,拓展網絡范圍;終端設備是實現具體功能的單元[7].Zigbee網絡可以實現星型、樹型和網狀型多種拓撲結構。
赫立訊公司的IP-Link產品是集射頻收發器、微處理器、多拓撲網絡功能于一體的無線通信模塊。
IP-Link1200 模塊內含AVR 微處理器,符合開放IEEE802.15.4協議的2.4 GHz免執照ISM頻段的射頻收發器,可以組成任意的網絡拓樸。因此,IP-Link1200是一款完全滿足智能車測控系統要求的無線通信模塊。
1.2 監控系統的組成結構
為了能對多個智能車的運行狀態實行在線監控,系統采用星形拓撲結構。該系統的網絡節點分為協調器節點和終端節點,其中協調器與上位機相連,終端節點嵌入智能車。
上位機(即PC 機)與下位機(智能車)采用無線通信。下位機采集智能車的行駛速度以及路況信息,判斷智能車的行駛方向,并計算出下一步的行動數據。同時,下位機將采集的各項數據以及下一步的行動數據發給上位機,使得調試人員可以在上位機上觀察小車當前的行駛參數以及對應的小車行駛狀態。因此,上位機與下位機之間的通信方式是上位機首先向下位機發送通信指令,然后接收下位機發送來的小車運行狀態信息。上位機對信息保存、顯示、修正,并將修正的參數發送到下位機。
2 系統硬件設計
智能車以MC9S12XS128單片機為主控芯片,該芯片擁有豐富的內部資源。利用單片機的脈寬調制模塊對智能車的舵機和電機進行驅動,2路PWM通道作為舵機角度控制,1路PWM通道用于電機的轉速控制;利用單片機的捕捉定時功能和A/D轉換模塊采集道路信號。
單片機與IP-Link1200的連接比較簡單方便。IP-Link1200的RXD可直接與單片機的SCI串行口發送端TXD相連接,TXD與單片機串行口接收端RXD相連接,RESET端接單片機的PE1口,通過PE1初始化IP-Link1200,即通過PE1輸出10 ms的負脈沖。下位機電路圖如圖1所示。
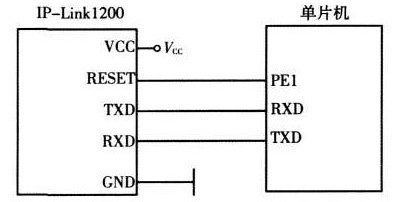
圖1 下位機電路圖
IP-Link1200與PC相連接時必須經過電平轉換,將TTL電平轉換為RS-232C電平,用1片MAX232 芯片便可以完成該轉換。IP-Link1200的RESET端接在復位電路上,該電路在上電時使IP-Link1200復位或按RST按鈕使IP-Link1200復位。上位機電路圖如圖2所示。

圖2 上位機電路圖
3 系統軟件設計
3.1 通信協議
本系統中上位機與智能車之間采用全雙工通信。無線網絡采用星狀網絡拓撲結構。與上位機相連的IP-Link1200 為協調器節點,與各個智能車相連的IP-Link1200為終端節點。無線網絡中各個終端節點的節點號即為智能車的標識號。
通信協議的定義能夠確保收發數據的正確率。實驗證明,2個AAH后跟1個55H在數據中出現的概率小,因此,用2個AAH后跟1個55H作為1個數據包的起始標志。當發送數據時,在數據包前加上起始標志。當接收方收到1個數據包,首先檢驗前3位是否是起始標志,若是,則繼續接收數據包,否則,放棄接收。命令碼是上位機向下位機發出的指令,占1 byte.其中低4位是操作代號,用"0"表示上位機需要讀取下位機中的數據;用"1"表示上位機需要向下位機中寫入數據。高4位是指令代號,表示上位機需要讀/寫下位機的哪組數據,例如舵機參數、路況參數、速度參數等。數據長度位,表示數據包中數據的個數。數據的糾錯處理采用CRC校驗方式。
3.2 通信模塊設計
通信系統的軟件主要有兩部分,一是上位機從串口接收和發送數據,二是智能車在MC9S12XS128單片機的控制下從IP-Link1200接收和發送數據。通信子程序在系統啟動時設置串行口的波特率為38 400 baud,并通過IP-Link1200給通信網絡中的各個子節點發送控制消息,查看各個節點是否連接正常。智能車中的通信子程序,上電時設置串行口的波特率為38 400 baud,設置無線網絡中各個終端節點的節點號為智能車的標識號,設置IP-Link1200的網絡拓撲結構為星型、傳輸波特率為38 400 baud、信道為11等。Zigbee網絡的建立是由與上位機相連的協調器發起的。首先,協調器進行掃描搜索,發現一個未用的最佳信道來建立網絡,然后再掃描搜索發現新的終端節點將其加入到這個網絡中。
3.3 下位機軟件設計
在上位機與上位機的通信中,上位機處于主動地位,下位機處于從屬地位。當下位機沒有收到上位機的通信指令時,小車就不斷地采集前方的道路信息,提取引導線,采集小車行駛速度,生成控制參數,控制著小車沿引導線前進。當小車收到上位機的通信指令時,首先判斷指令類型。若是上位機向下位機發來的修正數據包,下位機接收數據并修改運行參數;若是上位機要求下位機傳送小車運行參數的指令,下位機立即將發送類型字打包并上傳。
3.4 上位機軟件設計
上位機軟件采用VB語言來編寫,基于Windows 的窗口化程序設計MFC,使人機界面生動直觀,操作簡單。
上位機完成的主要功能是負責一次通信的發起,選擇需要采集的參數組,將接收到的數據存儲、顯示,并對參數進行修正。它的功能模塊分為主控模塊、通信模塊、數據庫管理模塊。主控模塊由數據接收子模塊、顯示子模塊和參數修正子模塊組成。數據接收子模塊由圖像信息子項、舵機相關參數子項、PID參數子項組成;參數修正子模塊完成對舵機轉角參數和PID算法中各因子的修正,當參數修正完成,立即執行發送參數修正命令,以此修改下位機的相應參數。
4 實驗及分析
應用本系統對智能車進行調試,能夠及時獲得智能車運行的各項參數,能夠及時觀察到智能車在給定參數控制下的運行狀態。同時,通過修改相應參數,調整智能車的運行狀態,使智能車的運行狀態達到最佳狀態。
圖3是智能車運行時電機控制的各項參數。在上位機上可以觀察智能車在同一路段運行時,PID各項因子的變化對智能車運行狀態的影響,通過不斷調整各項因子,使智能車在同一路段的運行狀態達到最佳。
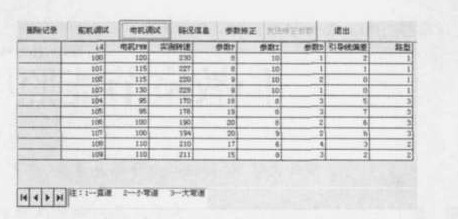
圖3 智能車運行時電機控制的各項參數
5 結論
本文應用Zigbee無線通信模塊設計并實現了智能車運行狀態實時監控系統。該系統能夠及時獲得智能車運行時的各項參數,及時觀察到參數的變化對智能車運行狀態的影響,使智能車的調試不再盲目,而是有的放矢。同時,也為控制算法的離線改進提供了有效的依據。