

3 軟件設計系統
系統的全數字化控制對實時性要求很高,同時還必須考慮控制精度,這兩點關系著整個系統性能的好壞。因此,縮短程序運行時間并保證計算精度是系統軟件設計的出發點。
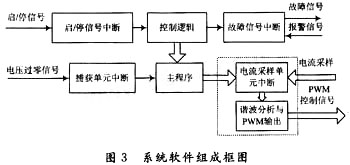
系統以一個采樣周期為運行周期,在每個運行周期內需完成數據采樣,計算瞬時諧波及無功電流分量值,產生6路PWM信號,分別控制6只IGBT管的開關狀態,這幾步過程應在一個運行周期內完成,否則實時性很難得到保證。系統軟件主要包括主程序、A/D轉換子程序、諧波和無功電流計算子程序、PWM信號輸出子程序、串行通信子程序等幾部分。
系統軟件組成框圖如圖3所示。
4 實驗結果與分析
為了驗證上述諧波檢測和控制方案的有效性以及由此構成的基于DSP的并聯型有源電力濾波器是否能很好地補償諧波和無功電流,本文進行了實驗。采用阻性負載作為三相不控橋式整流器的負載,試驗中在負載側接了1個2 Ω的電阻。下面以A相為例給出實驗波形。圖4分別給出了補償前后的負載電流波形和補償前后負載電流的頻譜圖。

從圖4中可以看出,在未加入APF時的A相電源電流波形發生了嚴重畸變,為尖頂波,在加入本實驗裝置之后電源電流的波形有了明顯的改善,十分接近于正弦波。同時,從頻譜圖中可以看出補償后電源電流畸變率很小,電源電流呈現出比較標準的正弦波,即電網電流中諧波和無功分量得到了較好的補償,有效地抑制了諧波并補償了無功分量。這說明APF試驗裝置是有效的,并驗證了本文提出的算法和主電路設計的正確性。
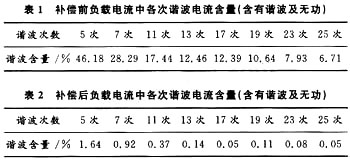
負載電流中含有高次諧波及無功電流時,負載電流總諧波畸變率THD=63.86%,負載電流中各次諧波電流含量見表1;補償后電源電流總諧波畸變率THD=5.35%,電源電流各次諧波電流含量見表2。
5 結 語
本文以并聯有源電力濾波器為研究對象,對其拓撲結構、補償分量的檢測算法、控制策略等問題作了較系統的研究。在該基礎上,介紹一種基于DSP的并聯型電力有源濾波器的設計。仿真實驗表明所設計的有源濾波器具有良好的諧波補償特性、自適應補償能力。