
引言
隨著汽車智能化程度的提高和迅速升級換代的需要,汽車電子網絡正在由集中式控制向link" href="http://m.jysgc.com/tags/分布式控制" title="分布式控制" target="_blank">分布式控制發展。LIN總線作為CAN總線的有效補充,以低速率和低成本的實現有效解決了分布式控制帶來的成本增加問題。在筆者研制的車身分布式控制系統中,采用CAN總線和LIN總線連接各個控制單元,完成單元之間的數據交換,系統結構如圖1所示。
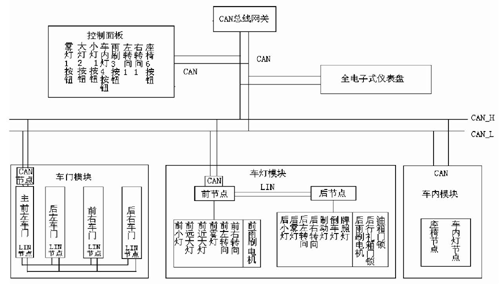
圖1 車身控制系統結構圖
該車身控制系統包括車燈模塊、車門模塊、車內模塊、控制面板模塊和儀表盤模塊,分別完成對相應負載的控制和監測,同時通過CAN總線完成數據交換。其中車燈模塊和車門模塊基于CAN/LIN總線以分布式的形式實現。本文重點論述的是LIN協議的實現。
LIN協議分析和狀態機的設計
有限狀態機是由一組狀態、一個起始狀態、輸入以及將輸入與當前狀態轉換為下一個狀態的轉換函數所組成,它是一個特殊的有向圖,包括一些狀態節點和連接這些狀態的有向弧。對特定的狀態機而言,首先要建立一些有效的狀態,然后設計相應的算法完成狀態的轉換。
一個完整的LIN幀由間隔場、同步場、PID、數據場以及校驗和場組成,LIN協議驅動器要實現的便是依序完成間隔場和同步場的檢測、ID的發送和接收、數據場字節的發送和接收,最后完成校驗。狀態機形式與LIN協議數據鏈路層規范的定義相吻合,可以通過建立相應的狀態來描述相應的場從而描述整個
LIN幀,且可以通過監控當前狀態,按照當前接收到的字節切換其狀態,從而以狀態轉換的方式依序完成各個場的發送和接收。設計以下幾個狀態:IDLE、BREAK、SYNBYTE、IDENTIFY、TRANCEIVE和
CHECKS UM,設置標志位state反映LINdriver的狀態,idle,pendin g,succe ss,當處于LIN正確通訊的中間狀態時,state=pending,當LIN通訊失敗,state=idle,當完成一次完整的LIN通訊,state=success。
狀態的監控和轉換是在UART接收中斷服務程序中實現的。因為LIN總線采用單根線通信,UART外接LIN物理層收發器,所以當UART發送的總線數據和接收到的總線數據一樣時,UART接收到的數據便是UART發送的數據,在接收中斷服務程序中完成狀態轉換算法,如圖2。通過判斷當前狀態和接收到的數據切換LINdriver的狀態,同時更新標志位。
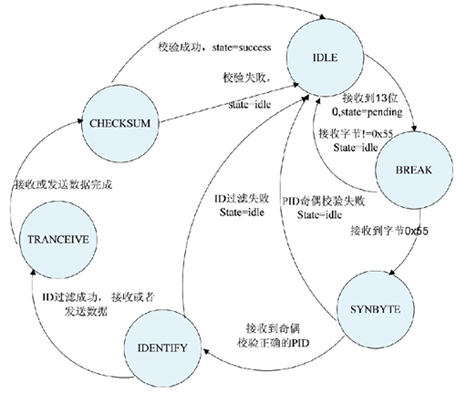
圖2 LIN協議狀態機
軟件設計
軟件設計流程如圖3所示。首先進行初始化,主要包括UART模塊的初始化和I/O腳初始化,設置波特率,使能接收中斷,設置LIN物理層收發器相應I/O腳方向及電平,然后在UART接收中斷服務程序中以狀態機的形式完成LIN通訊。下面結合LIN幀結構和LINdriver的狀態轉換對該狀態機算法進行闡述。

圖3 軟件流程圖
LIN幀以間隔場起始的,LIN- driver的起始狀態為IDLE,此時state=idle。間隔場是一個13位0的場,引起接收中斷同時置位UART模塊的frameerror位,在UART接收中斷服務程序中,判斷接收到的數據為0x00且frameerror標志位為1時,便認為接收到了間隔場,這時LINdriver從IDLE切換到BREAK,state=pending。
同步場是一個0x55的字節,當前狀態為BREAK時,如果接收到的數據為0x55,LINdriver切換為SYNBYTE,state=pending保持不變,否則切換為IDLE,state=idle;PID是帶奇偶校驗的ID,它以低6 位 ID0-ID5表示ID,高兩位P0、P1是對 該ID的奇偶校驗,當前狀態為SY NBYTE時,收到的數據便為PID。首先按照奇偶校驗算法對PID進行校驗,校驗通過再按照應用層協議對該PID進行過濾,過濾成功則LINdriver切換為TRANCEIVE,校驗失敗或者過濾失敗則LINdriver返回IDLE,state=idle;當前狀態為TRANCEIVE時,接收到的數據便是數據場中字節,當數據接收完畢,LINdriver切換為CHECKSUM。當前狀態為CHECKSUM時,接收到的數據便為校驗和場,校驗成功,便置state=success,表示成功地完成了一次LIN通訊,這時數據場中的數據是有效的,可以用于應用程序;校驗失敗表示LIN通訊失敗,數據場中數據無效。
結語
本文針對普通單片機,借助于其片上UART,以狀態機的形式實現了LIN協議驅動,降低了LIN的實現成本,運行可靠穩定,符合LIN總線以低成本作為CAN總線有效補充的初衷。