
1 系統(tǒng)介紹
深圳市眾為興數(shù)控技術(shù)有限公司自主研發(fā)設(shè)計的MR601機(jī)器人,是一款集工業(yè)教學(xué)應(yīng)用于一體的MIN I型6自由度機(jī)器人,如圖1所示,對應(yīng)連桿坐標(biāo)系見圖2。


該機(jī)器人采用基于PC機(jī)的開放式控制系統(tǒng),控制系統(tǒng)如下圖3所示。
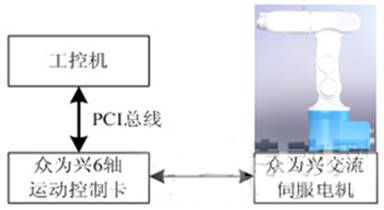
圖3 MR601機(jī)器人控制系統(tǒng)架構(gòu)
控制系統(tǒng)軟件采用VC6.0開發(fā),具有點位、空間直線、空間曲線運動功能,可以實現(xiàn)關(guān)節(jié)坐標(biāo)編程和空間直角坐標(biāo)編程,空間直角坐標(biāo)與關(guān)節(jié)坐標(biāo)相互轉(zhuǎn)換。
2 軌跡試驗
現(xiàn)讓機(jī)器人繪制一正方形,以驗證機(jī)器人整體性能。
機(jī)器人末端固定一黑色油性筆,工作平臺上放置一白色帶灰色條紋瓷磚,見下圖4所示,以便于機(jī)器人在其上繪圖。
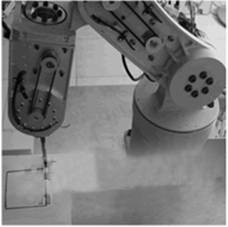
圖4 機(jī)器人軌跡試驗圖
機(jī)器人末端姿態(tài)采用ZYZ歐拉角表示,單位為度;坐標(biāo)單位為毫米,在直角坐標(biāo)空間對機(jī)器人末端執(zhí)行器坐標(biāo)設(shè)置如下:
第一點:坐標(biāo)(350,0,5),姿態(tài)(0,180,0);
第二點:坐標(biāo)(450,0,5),姿態(tài)(0,180,0);
第三點:坐標(biāo)(450,100,5),姿態(tài)(0,180,0);
第四點:坐標(biāo)(350,100,5),姿態(tài)(0,180,0);
第五點:坐標(biāo)(350,0,5),姿態(tài)(0,180,0);
其中,第一點與第五點重合以保證繪制出一封閉正方形。
將直角空間坐標(biāo)轉(zhuǎn)換為關(guān)節(jié)空間坐標(biāo)。機(jī)器人根據(jù)生成的關(guān)節(jié)坐標(biāo)進(jìn)行正方形繪制。各點位置以及繪制結(jié)果如下圖5所示。
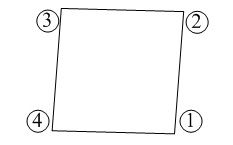
圖5 機(jī)器人繪制軌跡圖
結(jié)果顯示,機(jī)器人所繪制軌跡為一平形四邊形,存在以下問題:
(1) 第1點與實際點偏移2mm;
(2) 邊12和邊34與期望軌跡夾角為2度;
(3) 邊23和邊41與期望軌跡有近1度偏移;
(4) 軌跡線條不均勻。
3 誤差分析
機(jī)器人的結(jié)構(gòu)設(shè)計與裝配對整體的性能影響很大,在對程序、電器部分排查后,將誤差的原因鎖定在結(jié)構(gòu)部分。
機(jī)器人第一關(guān)節(jié)電機(jī)安裝在基座上,其余5個關(guān)節(jié)電機(jī)安裝在同一個方向,見圖2坐標(biāo)系X0Y0Z0中X0負(fù)向,重量集中在該方向。
用手晃動每個關(guān)節(jié),發(fā)現(xiàn)第二關(guān)節(jié)(見圖2 坐標(biāo)系X2Y2Z2)存在關(guān)節(jié)間隙,該間隙主要是軸承軸向間隙引起。初步判斷機(jī)器人軌跡偏移可能是由于第2個關(guān)節(jié)的間隙產(chǎn)生,機(jī)器人手臂重量導(dǎo)致手臂向間隙方向有一定角度的滾翻,即繞X0軸逆時針轉(zhuǎn)動一微小角度。
4 建模仿真
現(xiàn)增加一虛擬關(guān)節(jié),等效機(jī)械手臂的滾翻。虛擬關(guān)節(jié)軸線垂直于第2關(guān)節(jié)的軸線方向,建立圖6所示的相關(guān)機(jī)器人坐標(biāo)系。
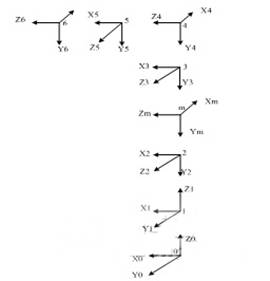
圖6 增加虛擬關(guān)節(jié)機(jī)器人坐標(biāo)系
其中:Z0為基座原點,坐標(biāo)系X2Y2Z2為機(jī)器人第2關(guān)節(jié)坐標(biāo)系,坐標(biāo)系XmYmZm為增加的機(jī)器人虛擬關(guān)節(jié)坐標(biāo)系,軸線Zm垂直于關(guān)節(jié)2軸線Z2。
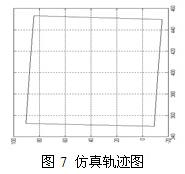
根據(jù)圖6的坐標(biāo)系建立機(jī)器人空間運動方程。根據(jù)邊線12和邊線34的偏移角度,假定虛擬關(guān)節(jié)旋轉(zhuǎn)2度,其狀態(tài)在運動過程中不發(fā)生變化。進(jìn)行MATLAB動態(tài)仿真,仿真結(jié)果如下圖。
由圖7的仿真圖與圖5的實際軌跡圖對比可知,兩者的軌跡走向基本一致;從圖8的Z向誤差圖可以得知,機(jī)械間隙導(dǎo)致Z向有近0.1mm的變化。
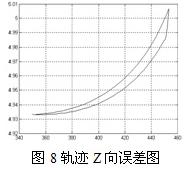
由仿真分析結(jié)果可以斷定,軌跡偏移主要由第2關(guān)節(jié)的軸承間隙引起。
從直觀角度分析:(1)關(guān)節(jié)間隙導(dǎo)致機(jī)器人手臂有一定范圍的滾翻,翻滾角度不變,隨著手臂的展開偏移誤差不斷增大,導(dǎo)致邊線傾斜。(2)Z向誤差導(dǎo)致筆尖上下移動,線條軌跡不均勻。
5 后記
本方法將關(guān)節(jié)間隙等效為一個旋轉(zhuǎn)一定角度的虛擬關(guān)節(jié),在定性分析的同時,得到關(guān)節(jié)間隙對機(jī)器人精度的量化誤差。
根據(jù)建立的誤差方程求解機(jī)器人的逆解,部分關(guān)節(jié)軌跡為復(fù)數(shù)解。說明通過算法對于該誤差的補(bǔ)償很有限,機(jī)器人整體機(jī)械結(jié)構(gòu)是決定機(jī)器人精度的關(guān)鍵因素。
對第2關(guān)節(jié)的軸承進(jìn)行調(diào)整,軌跡偏移問題得到解決,可以繪制出規(guī)則的圖形。