
0 引 言
移動機(jī)器人是一種能夠感知外部環(huán)境,在有障礙物的環(huán)境中能夠?qū)崿F(xiàn)動態(tài)決策與規(guī)劃,從而完成避障等多種功能的綜合系統(tǒng)。機(jī)器人系統(tǒng)通常分為機(jī)構(gòu)本體和控制系統(tǒng)兩部分,控制系統(tǒng)的作用是根據(jù)用戶的指令對機(jī)構(gòu)本體進(jìn)行操作和控制。隨著機(jī)器人的智能化水平越來越高,控制器要有方便、靈活的操作方式,以及多種形式的控制方式和高度可靠性,還要有很高的實(shí)時性。
為了保證系統(tǒng)的實(shí)時性,簡化控制系統(tǒng)軟件的設(shè)計,有必要在控制系統(tǒng)引入嵌入式操作系統(tǒng)。本設(shè)計將嵌入式技術(shù)與機(jī)器人技術(shù)相結(jié)合,利用ARM作為硬件平臺并移人μC/OS-Ⅱ嵌入式實(shí)時操作系統(tǒng),開發(fā)了具有多線程、多任務(wù)管理的控制終端。嵌入式主控制器ARM是整個機(jī)器人控制系統(tǒng)的核心,主要完成環(huán)境感知、組織管理、總體任務(wù)分配。嵌入式主控器作為機(jī)器人的運(yùn)算層,一方面作為控制上位機(jī),可以通過串口與下位機(jī)伺服控制系統(tǒng)通信,從而完成機(jī)器人的運(yùn)動控制;另一方面還提供了與遙控操作端或用戶端的無線通信接口。本文設(shè)計的機(jī)器人控制系統(tǒng)可應(yīng)用于日常生活、足球機(jī)器人以及其他科學(xué)探索領(lǐng)域。
1 系統(tǒng)組織架構(gòu)與硬件設(shè)計
設(shè)計時考慮到機(jī)器人在體積、質(zhì)量等方面的限制,以及要滿足功耗低,實(shí)時性高,性能優(yōu)越的特點(diǎn),選擇合適的軟硬件結(jié)構(gòu)及有效的控制模式是整個設(shè)計過程的關(guān)鍵。
1.1 系統(tǒng)總體架構(gòu)
整個機(jī)器人控制系統(tǒng)由嵌入式主控制器、伺服控制模塊、無線通信模塊和傳感檢測模塊組成。控制系統(tǒng)的總體架構(gòu)如圖1所示。
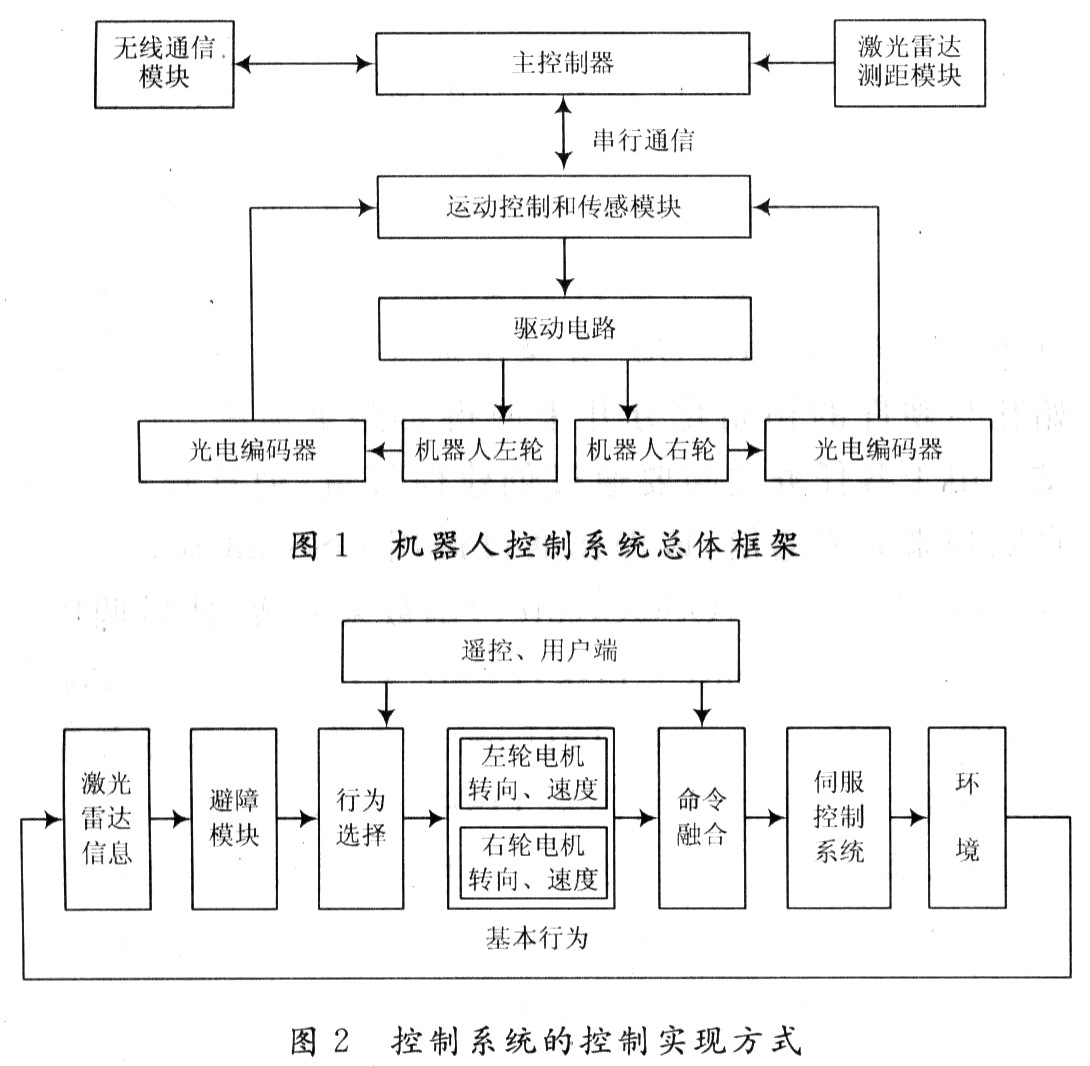
按功能劃分,該控制系統(tǒng)分為上下兩層。由實(shí)現(xiàn)任務(wù)管理、運(yùn)動軌跡生成、定位的上層控制系統(tǒng),以及完成機(jī)器人伺服控制、傳感器信息采集的下層控制系統(tǒng)組成。上層控制系統(tǒng)是整個控制系統(tǒng)的核心控制層,它有兩種控制實(shí)現(xiàn)方式:一種是獨(dú)立運(yùn)行模式,另一種是遙控或遠(yuǎn)程實(shí)時控制模式。獨(dú)立運(yùn)行模式有自己的運(yùn)行參數(shù),即上層控制系統(tǒng)根據(jù)激光雷達(dá)的信息傳遞到環(huán)境建模模塊,產(chǎn)生環(huán)境地圖并產(chǎn)生避障算法所需信息,控制器根據(jù)避障模塊信息產(chǎn)生機(jī)器人本體速度和方向信息,傳遞到運(yùn)動控制器。在運(yùn)動控制底層程序定義了一系列程序,運(yùn)動控制器通過解釋上層控制系統(tǒng)傳遞過來的信息并執(zhí)行相應(yīng)程序,從而達(dá)到機(jī)器人控制的目的,實(shí)現(xiàn)實(shí)時避障。遙控器或遠(yuǎn)程實(shí)時控制模式是通過無線通信單元接收用戶端或遙控端發(fā)出的命令,實(shí)現(xiàn)對機(jī)器人的實(shí)時控制。系統(tǒng)的控制實(shí)現(xiàn)方式如圖2所示。
1.2 主控制模塊
主控制模塊采用SAMSUNG公司16/32位RISC處理器S3C4480作為控制器。S3C4480功耗低,有多種電源供電方式,有多種外部存儲器訪問,新的總線體系結(jié)構(gòu)(SAMBA),速度可達(dá)132 MHz。主控模塊使用Hynix公司的HY57V281620(SDRAM)以及SAM-SUNG公司的Nand-Flash芯片K9F2808U作為存儲器。為了增大數(shù)據(jù)吞吐能力,選取了2片SDRAM構(gòu)成32位地址寬度。S3C4480使用ARM7TDMI核,它滿足μC/OS-Ⅱ正常運(yùn)行的所有條件,設(shè)計時S3C4480移入μC/OS-Ⅱ操作系統(tǒng),將加快處理器的應(yīng)用和開發(fā),而且還能提高系統(tǒng)的實(shí)時性。通過將系統(tǒng)的功能劃分成按不同優(yōu)先級調(diào)度的任務(wù),實(shí)現(xiàn)對機(jī)器人的多任務(wù)控制,主控制模塊中的路徑規(guī)劃任務(wù)采用柵格法。
1.3 激光雷達(dá)測距模塊
激光雷達(dá)是一種工作在從紅外線到紫外光譜段的雷達(dá)系統(tǒng),相對于超聲波、紅外、攝像頭等其他傳感測距方法,激光雷達(dá)具有探測距離遠(yuǎn),測量精度高,價格相對適中等優(yōu)點(diǎn)。在本設(shè)計中使用德國施克公司的LMS291激光測量系統(tǒng),基于飛行時間測量原理,180°掃描角度,可以設(shè)置三個保護(hù)區(qū)域,具有濾波功能,以消除障礙檢測過程中激光雷達(dá)的測距噪聲干擾。
LMS291激光雷達(dá)通過旋轉(zhuǎn)鏡面向各個方向發(fā)射脈沖激光,并由LMS291接收器接收反射光線。該激光雷達(dá)響應(yīng)時間可固定為13 ms,發(fā)射角為幾mrad的激光脈沖,通過測量發(fā)射脈沖與反射脈沖之間的時間延遲,并乘以光速,就可以測得障礙物的距離。時間測量通過圖3所示的脈沖填充法求出。
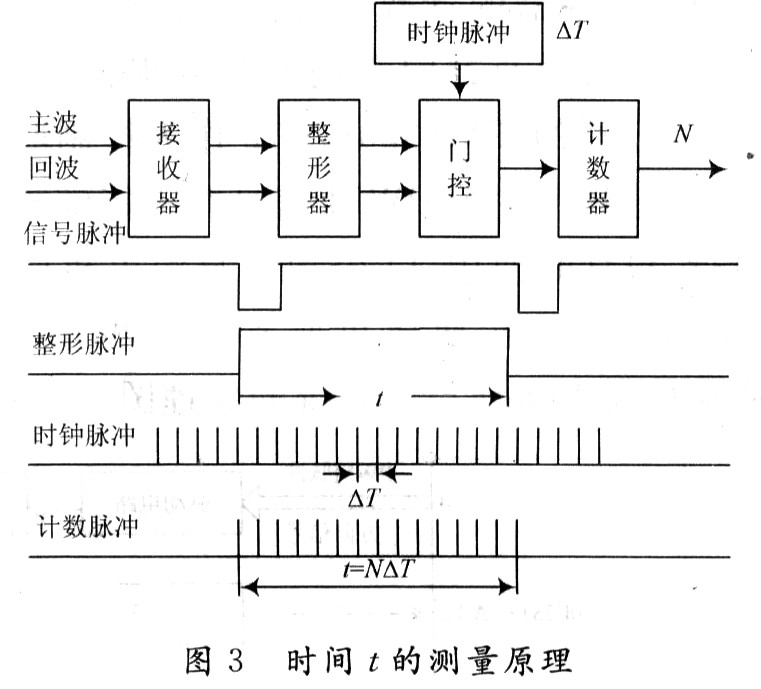
如果計數(shù)值為N,則t=N△T=N/f,從而可得L=ct/2=cN/(2f),其中,f為時鐘脈沖。
LMS291激光測量系統(tǒng)提供RS 232數(shù)據(jù)接口,本設(shè)計主控制器采用的是S3C44B0,由于它的LVTTL電路所定義的高、低電平信號為正邏輯,而RS 232標(biāo)準(zhǔn)采用負(fù)邏輯方式,兩者間通信要進(jìn)行電平轉(zhuǎn)換,在設(shè)計時系統(tǒng)采用RS 232電平轉(zhuǎn)換芯片MAX232ACPE實(shí)現(xiàn)串口的通信。
1.4 無線通信模塊
無線通信模塊利用從前端RF接收到的遙控端或用戶端的信息通過串口發(fā)送到機(jī)器人,也可將機(jī)器人的信息通過無線通信模塊發(fā)送出去。前端RF使用Chip-con公司生產(chǎn)的CC2420芯片,無線通信模塊采用的微控制器為Microchip公司的 PIC18LF4620。CC2420與PIC18LF4620都使用3.3 V作為工作電壓,可以降低功耗,CC2420只需通過SI,SO,SCLK,CSn與PIC18LF4620的SPI接口進(jìn)行連接。本設(shè)計中使用 PIC18LF4620的RC6,RC7引腳作為RS 232的數(shù)據(jù)發(fā)送端與數(shù)據(jù)接收端。CC2420是一款較為通用的符合IEEE802.15.4的2.4 GHz ZigBee收發(fā)芯片,該芯片在集成了PHY層和部分MAC層的同時,還提供了許多硬件支持。
1.5 伺服控制模塊
運(yùn)動控制模塊通過RS 232與主控制模塊連接,主控制模塊通過串行總線將期望速度、方向信息傳送至運(yùn)動控制器,運(yùn)動控制器將信息處理后作為運(yùn)動控制算法的輸入量,運(yùn)動控制算法得到以PWM形式表示的電機(jī)控制信息。為判斷電機(jī)轉(zhuǎn)速及運(yùn)轉(zhuǎn)方向,安裝在電機(jī)上的光電編碼器提供相位相差90°的兩個通道的光碼脈沖輸出,光電編碼器產(chǎn)生的兩脈沖送入DSP的正交編碼脈沖單元的QEP1,QEP2引腳,通過DSP的比較單元CAP1,CAP2捕捉,然后經(jīng)譯碼單元產(chǎn)生內(nèi)部4倍頻后的脈沖信號CLK以及轉(zhuǎn)向信號,將脈沖信號送入選定的計數(shù)器進(jìn)行計數(shù),計數(shù)方向由轉(zhuǎn)向信號決定,通過讀取選定通用定時器的計數(shù)值、脈沖數(shù)、計數(shù)方向可得到電機(jī)的轉(zhuǎn)速、行程及方向為伺服控制提供反饋輸入。沒計使用TI公司的TMS320F2812作為控制驅(qū)動模塊的控制器,該芯片產(chǎn)生的PWM信號并不能夠直接驅(qū)動電機(jī)的執(zhí)行,設(shè)計時使用TI公司的直流電機(jī)驅(qū)動芯片SN7S4410將PWM轉(zhuǎn)換成可驅(qū)動電機(jī)的驅(qū)動信號。圖4為移動機(jī)器人運(yùn)動控制系統(tǒng)的原理圖。
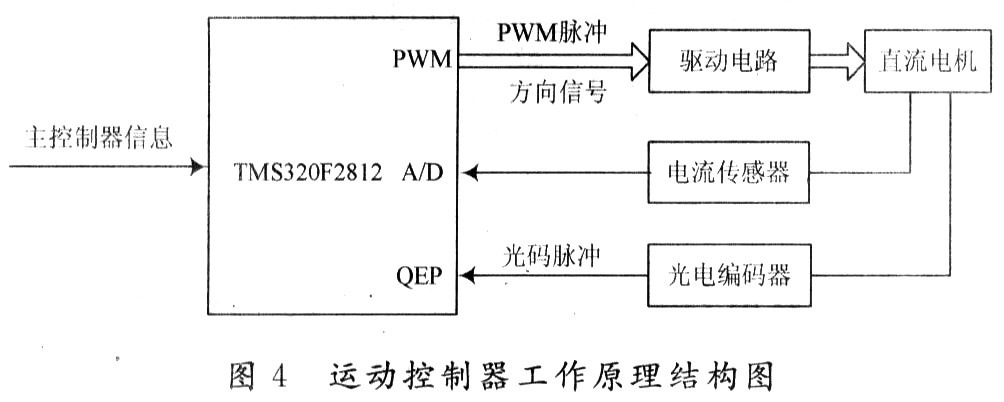
圖4中電流傳感器為霍爾元件電流傳感器,將采集到的電機(jī)電流信息送入A/D轉(zhuǎn)換接口,從而整個運(yùn)動控制系統(tǒng)形成雙閉環(huán)控制系統(tǒng)。運(yùn)動控制器中運(yùn)動控制算法采用PID算法,設(shè)定允許的誤差為e0,設(shè)定如下關(guān)系:
當(dāng)| e(k)|≤e0時,控制器不起作用;
當(dāng)| e(k)|>e0時,可以得到控制器的輸出為:

PWM信號的寬度由時間管理器中定時器的周期寄存器和與該定時器相關(guān)的比較寄存器決定,經(jīng)過PID處理后的控制器輸出u(k)為脈沖的占空比,然后寫入選定定時器的比較寄存器,比較寄存器與周期寄存器的比值即為PWM波形的占空比,從而實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。
2 軟件設(shè)計
該機(jī)器人控制系統(tǒng)的軟件設(shè)計包括主控制模塊、DSP運(yùn)動控制器算法程序、PIC18LF4620的程序設(shè)計。PIC18LF4620的程序設(shè)計在這里不做介紹。
2.1 主控制模塊程序設(shè)計
主控制模塊軟件設(shè)計是在μC/OS-Ⅱ平臺上設(shè)計各硬件的驅(qū)動程序,創(chuàng)建和啟動各項任務(wù),創(chuàng)建信號量、消息郵箱、消息隊列完成各任務(wù)間的通信。
針對S3C4480的硬件資源和編譯器特性,移植時要對μC/OS一Ⅱ的三個源文件做修改:
(1)OS_CPU.H頭文件與編譯器相關(guān)的數(shù)據(jù)類型重新修改;
(2)OS_CPU_ A.S文件中修改處理器相關(guān)的4個匯編函數(shù);
(3)OS_ CPU.C文件中編寫初始化任務(wù)的堆棧函數(shù)。
μC/OS-Ⅱ中程序是從main()函數(shù)開始執(zhí)行,程序啟動后跳轉(zhuǎn)至主程序運(yùn)行,調(diào)用ARMInit()初始化ARM系統(tǒng),包括建立相關(guān)參數(shù)和變量,配置ARM處理器中斷端口、設(shè)置中斷并初始化各器件,然后調(diào)用OSInit()初始化μC/OS-Ⅱ操作系統(tǒng),將操作系統(tǒng)的初始化與硬件的初始化分開來使得思路更清晰,便于調(diào)試。由于各任務(wù)之間要通過創(chuàng)建信號量、消息郵箱、消息隊列來完成通信,該操作通過調(diào)用 OSSemCreate(),OSMboxCreate(),OSQCreate()函數(shù)來完成,然后調(diào)用 OSTaskCreate(void(*task)(void*pd),void*pda-ta,OS_STK*ptos,INT8U prio)函數(shù)創(chuàng)建各任務(wù)完成系統(tǒng)控制。最后調(diào)用函數(shù)OSStlart(),μC/OS-Ⅱ開始運(yùn)行,執(zhí)行任務(wù)。本系統(tǒng)設(shè)計時主要完成的任務(wù)有無線通信任務(wù)、命令解釋任務(wù)、激光雷達(dá)信息處理任務(wù)。
2.2 伺服控制模塊程序設(shè)計
伺服控制模塊利用高速的DSP運(yùn)動控制器與反饋信號組成閉環(huán)控制系統(tǒng),DSP發(fā)送PWM波與方向信號控制直流電機(jī)的轉(zhuǎn)速,通過速度反饋,DSP可實(shí)時讀取當(dāng)前速度,利用DSP中的控制程序根據(jù)速度讀數(shù)控制PWM的占空比,從而實(shí)現(xiàn)閉環(huán)控制。主程序流程圖如圖5所示。

在DSP的事件管理器中,將其中一個定時器設(shè)定一個中斷周期,每當(dāng)定時器產(chǎn)生中斷時,調(diào)用中斷處理子程序獲得電機(jī)的反饋速度。
3 結(jié) 語
根據(jù)新型激光雷達(dá)跟蹤測量理論,開發(fā)研制了基于μC/OS-Ⅱ的機(jī)器人實(shí)時控制系統(tǒng)。該控制系統(tǒng)已成功用于實(shí)驗室自主研制開發(fā)的足球機(jī)器人。性能測試表明,該機(jī)器人控制系統(tǒng)能夠快速及時跟蹤定位目標(biāo),并且能夠通過無線通信模塊與遙控端進(jìn)行通信,完成指定操作指令。該控制系統(tǒng)采用的控制決策算法為PID,今后將致力于研究采用更為先進(jìn)的算法。