
1引言
隨著計算機技術和網絡技術的發展,各種新型的控制方式應用于機器人控制。分布式控制系統是在計算機監督控制系統、直接數字控制系統和計算機多級控制系統的基礎上發展起來的,是生產過程的一種比較完善的控制與管理系統。與計算機多級控制系統相比,分布式控制系統在結構上更加靈活、布局更為合理和成本更低。分布式控制結構成為機器人控制系統發展的方向。文[2]中作者設計了一種基于CAN總線的分布式的仿人機器人的控制系統。
為此,我們研制了新型的小型仿人機器人控制系統。本實驗室研制的小型仿人機器人各關節采用舵機控制,根據要求,本設計需要實現小型仿人機器人腿部的運動控制,達到小型化,低功耗。
2小型仿人娛樂機器人分布式控制系統
2.1總體方案設計
本文研究的小型仿人娛樂機器人運動控制系統由主控制器ARM9,C8051F320單片機與4片CD4017外部計數器構成的控制單元組成,控制結構簡單靈活。USB通信方案滿足了主從控制和通信速度的需求。關節執行機構采用舵機,控制方法簡單實用。總體控制方式簡圖見圖1。
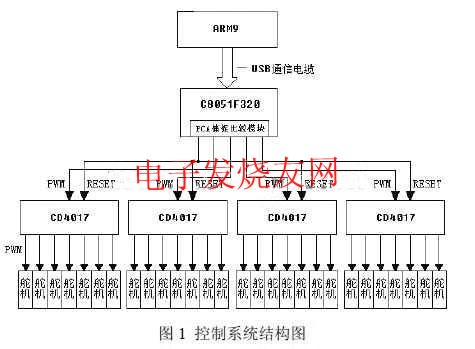
主控制器端,采用ARM9(S3C2410)作為管理控制器負責協調控制,向單片機發送規劃好的運動控制數據并擴展語音,視頻等。S3C2410主控制器有一個USB host,連接C8051F320單片機。
單片機端,利用C8051F320中的PCA捕捉比較模塊產生PWM控制信號。當單片機通過USB總線接收到由ARM管理控制器發來的數據包時,根據設定的對應關系將數據包中16位控制數據轉化為PCA比較值,由PCA模塊產生相應占空比的PWM控制信號,分別輸出給4片CD4017外部計數器。同時PCA模塊還定時產生一路復位脈沖,同時發送給4片CD4017,確保CD4017多路PWM輸出與單片機接收到多舵機控制數據對應關系正確。C8051F320控制器電路板如圖2。

CD4017外部計數器將CP引角輸入的PWM轉化為多路PWM,分別控制與之相連的各舵機轉動,實現各桿件位置的開環控制。CD4017引腳功能及排列如圖3。
2.2 USB通信的實現
在計算機和單片機的控制數據傳輸領域內,長期以來廣泛的使用RS-232,RS-485等通信方式,這些通信方式訊的實時性較差, 故障率較高, 出現故障時, 不容易排查[3]。不能夠滿足小型仿人機器人的實時性和大批量數據傳輸的要求。USB總線通信方式作為新一代計算機外設的接口技術,隨著USB技術的日益成熟,及獨特的優點(對多種設備的廣泛適用性,自動配置,容易擴充,易于連接,熱插拔,即插即用、高可靠性,低成本,低功耗等),應用前景非常廣泛[4]。
本控制系統中的管理控制器ARM9(S3C2410)集成了一個USB host,采用Linux操作系統;C8051F320器件集成了全速/低速USB功能控制器,用于實現USB接口的外部設備,均支持USB2.0通信協議。單片機端設計了通信固件程序和應用程序,用于接收USB通信內容。
2.3基于C8051單片機和CD4017外部計數器的關節控制器設計
采用一片單片機與4片CD4017外部計數器的關節控制器設計方案,極大限度的精簡了硬件數量,節省了空間,降低了軟硬件出錯的可能性,也為系統運動功能的擴展提供了足夠空間和靈活性(自由度數量設置可在36個以內任意增減)。
基于C8051的設計中有很多方法用于產生PWM波形:軟件循環、查詢或中斷驅動的定時器等。使用可編程計數器陣列PCA產生PWM相對于任何查詢機制(基于軟件或定時器而言)可以大大降低所需要的CPU帶寬,并可以消除在中斷驅動的基于定時器的設計中因中斷延遲不一致而產生的時序抖動。PCA由一個專用的16位計數器/定時器和5個16位捕捉/比較模塊組成。每個捕捉/比較模塊有其自己的I/O線。計數器/定時器由一個可編程的時基信號驅動。計數器/定時器有一個16位的計數器/定時器寄存器、一個用于選擇時間基準的方式寄存器和一個包含計數器/定時器運行控制及各模塊捕捉/比較標志的控制寄存器。每個捕捉/比較模塊有一個用于選擇模塊工作方式的配置寄存器和一個16位的捕捉/比較寄存器。每個捕捉/ 比較模塊的工作方式都可以被獨立配置。由于所有的捕捉/比較模塊共享一個時間基準,因此它們同步工作[5][6]。本文研究的小型娛樂機器人關節控制器設計中,將PCA配置為獨立工作;每個模塊的中斷服務程序只影響該模塊的捕捉/比較寄存器。PCA方式寄存器和配置寄存器設置一次后不再改變,讓計數器/定時器寄存器自由運行。
在高速輸出方式,每當PCA計數器與模塊的16位捕捉/比較寄存器發生匹配時,模塊I/O線的引腳上的邏輯電平將發生高低轉換,并可以選擇產生中斷。本應用程序中選擇了該中斷。
CD4017基本功能是對CP端輸入脈沖的個數進行十進制計數,并按照輸入脈沖的個數順序將脈沖分配在Y0~Y9這10個輸出端,計滿10個數后計數器復零,同時CO端輸出一個進位脈沖。當CR端有正脈沖輸入時,該脈沖的上升沿將觸發CD4017復位,此時Y1~Y9輸出均變為低電平,只有Y0腳輸出變為高電平,故可以利用CR的正脈沖輸入中斷計數[7]。
本文研究的小型娛樂仿人機器人控制系統方案中,一個CD4017輸出7路脈沖,分別發送給7個舵機。
3 實驗
控制系統硬件實物連接圖如圖4。

機器人步行實驗完成5步的向前行和5步的后退的行走過程。步行實驗過程如圖5。
4 結論
根據小型仿人機器人的機構特點和性能要求,構建了以ARM9為主控制器的小型仿人機器人控制系統。設計開發了C8051USB單片機和CD4017外部計數器組成關節控制器,該關節控制器能夠實現多舵機的協調控制任務。實踐證明,采用該結構之后,整個機器人系統的模塊化程度更高,系統的裝配和調試更加方便。控制系統實現了小型化、低功耗,而且機器人行走穩定性。