
摘 要:傳統(tǒng)的基于圖像序列的人體步態(tài)分析往往采用復(fù)雜的數(shù)學(xué)模型" title="數(shù)學(xué)模型">數(shù)學(xué)模型,使得分析不能快速實(shí)現(xiàn)。摒棄了復(fù)雜的數(shù)學(xué)模型,而采用2D" title="2D">2D+t的形式,利用圖像序列時(shí)空XYT中的XT切片獲得下肢輪廓的運(yùn)動(dòng)數(shù)據(jù)。根據(jù)這些數(shù)據(jù),采用基于模糊集的Kalman 濾波的方法重建了運(yùn)動(dòng)軌跡,從而獲得了每一時(shí)刻的速度及加速度信息,并克服了下肢運(yùn)動(dòng)的數(shù)據(jù)遮擋現(xiàn)象。
關(guān)鍵詞: 單目圖像序列 步態(tài)分析 時(shí)空切片 模糊集 軌跡重建
人體步態(tài)分析在臨床診斷、物理治療和體育訓(xùn)練等領(lǐng)域有重要意義[1]。通過(guò)步態(tài)分析可以獲得人體下肢的運(yùn)動(dòng)信息,從而為病人的康復(fù)治療及運(yùn)動(dòng)員的優(yōu)化訓(xùn)練提供依據(jù)。
現(xiàn)有的基于圖像序列的步態(tài)分析方法常將人體視為一連接型物體(Articulated object ,就是以某種連接方式連接在一起的多個(gè)剛性部分組成的物體),并借助于圖像序列分析的方法獲取運(yùn)動(dòng)參數(shù)。Rashid[2]的方法是將一些小亮斑置于人體的各關(guān)節(jié),在攝像機(jī)獲得人體運(yùn)動(dòng)的圖像序列后可由這些小亮斑的位置得到人體運(yùn)動(dòng)的骨架型模型,然后通過(guò)這種模型跟蹤人體的運(yùn)動(dòng)。Chen[3]的模型采用了14個(gè)連接點(diǎn)和17個(gè)剛性連接部分,并對(duì)人體的運(yùn)動(dòng)施加了一些約束,如:雙腿或雙手不能同時(shí)向前或向后運(yùn)動(dòng)等。因?yàn)槟承┪纯祻?fù)病人的運(yùn)動(dòng)往往不全滿足這些約束,所以Chen的方法對(duì)于獲取未康復(fù)病人的運(yùn)動(dòng)參數(shù)存在明顯的缺陷。Baumberg[4]利用周期B樣條逼近圖像序列的人體輪廓,并通過(guò)對(duì)若干圖像序列的訓(xùn)練自動(dòng)獲得2D的輪廓模型。
以上的分析方法都建立在復(fù)雜的數(shù)學(xué)模型之上,計(jì)算的負(fù)擔(dān)較重,有的方法甚至要花很長(zhǎng)的時(shí)間才能得到運(yùn)動(dòng)參數(shù)的估計(jì)值。另外,以上的一些分析方法除考慮步態(tài)的分析參數(shù)外,還涉及了諸如手勢(shì)等人體其它部分的分析參數(shù),這對(duì)于步態(tài)分析而言,自然是浪費(fèi)了許多不必要的時(shí)間。現(xiàn)有的這些方法的執(zhí)行速度,嚴(yán)重影響了它們的實(shí)際應(yīng)用。
針對(duì)現(xiàn)有分析方法所存在的缺陷,本文將利用時(shí)空XYT中的XT切片上的數(shù)據(jù)實(shí)時(shí)地重建出運(yùn)動(dòng)軌跡,并由此反映出人體的步態(tài)情況。在運(yùn)動(dòng)軌跡的重建中,本文利用基于常加速度模型的Kalman濾波,并利用模糊綜合評(píng)判的方式進(jìn)行軌跡關(guān)聯(lián),使得兩腿在交叉時(shí)刻附近的運(yùn)動(dòng)軌跡能得到正確的延續(xù)。
1 本文方法的實(shí)現(xiàn)過(guò)程
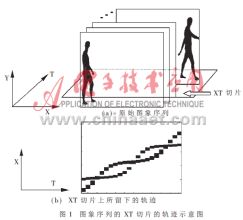
圖1(a)為一人體運(yùn)動(dòng)圖像序列,圖1(b)為圖像序列的時(shí)空XYT的某一切片XT,它顯示了兩條腿所留下的印跡。這些印跡包含著人體運(yùn)動(dòng)的步態(tài)信息,如何利用XT上的印跡獲取步態(tài)參數(shù)是十分重要的。本文的方法是利用Kalman濾波建立XT上的兩下肢輪廓點(diǎn)的運(yùn)動(dòng)軌跡(共四條軌跡),同時(shí)得到每一時(shí)刻運(yùn)動(dòng)軌跡的速度及加速度信息。輪廓點(diǎn)的遮擋問(wèn)題可以通過(guò)Kalman濾波對(duì)輪廓點(diǎn)的預(yù)測(cè)得到解決。
1.1 軌跡跟蹤
在一維跟蹤中,可定義狀態(tài)向量為:

其中,x(t)為位置坐標(biāo);v(t)和a(t)分別代表速度和加速度。由狀態(tài)向量可得狀態(tài)方程" title="狀態(tài)方程">狀態(tài)方程為:
X(t+1)=ΦX(t)+ψn(t) (2)
其中:
T為圖像幀間的時(shí)間間隔;n(k)為零均值白噪聲" title="白噪聲">白噪聲序列。對(duì)所有的k和j,E[n(k)n(j)]=σ2nδkj。
由狀態(tài)向量可得到觀測(cè)方程為:
P(t)=Hx(t)+η(t) (4)
其中H=[1、0、0];η一維零均值噪聲,方差為。
根據(jù)文獻(xiàn)[5]、σ2x和σ2n的值可根據(jù)圖像序列的實(shí)際情況加以確定。
由于狀態(tài)方程和觀測(cè)方程都是線性的,所以我們可以用標(biāo)準(zhǔn)的卡爾曼濾波器分別對(duì)四條軌跡進(jìn)行預(yù)測(cè)跟蹤。有關(guān)卡爾曼濾波的具體內(nèi)容請(qǐng)參閱文獻(xiàn)[5]、這里不再贅述。
1.2 用模糊綜合評(píng)判進(jìn)行軌跡關(guān)聯(lián)
在軌跡的關(guān)聯(lián)中,我們用模糊集理論對(duì)預(yù)測(cè)點(diǎn)與實(shí)際點(diǎn)之間的距離、三幀圖像的方向函數(shù)及速度函數(shù)進(jìn)行綜合評(píng)判[6]。取評(píng)判因子為λ1、λ2和λ3。距離的隸屬度函數(shù)的取法如下:

(5)式中MAX(d)是指整個(gè)圖像序列中的距離的最大值。Pipt+1為軌跡i在t+1幀圖像中的預(yù)測(cè)位置,Pjpt+1為t+1幀圖像中點(diǎn)j的位置。方向的隸屬度函數(shù)的取法如下:
速度的隸屬度函數(shù)的取法如下:

其中、MAX(S)指整個(gè)圖像序列的最大速度函數(shù)值。
模糊評(píng)判按下式進(jìn)行:

對(duì)于軌跡i,我們將第t+1時(shí)刻的每一輪廓點(diǎn)代入(5)式,并計(jì)算出最小的M(i、j)。這樣,我們就可以將點(diǎn)j歸入軌跡i之中。如果特征點(diǎn)" title="特征點(diǎn)">特征點(diǎn)j同時(shí)使下面二式成立:
M(i、j)=min(M(i、s)) (9)
M(k、j)=min(M(k、s)) (10)
上兩式中s代表t+1時(shí)刻的任一輪廓點(diǎn)。在這種情況下,我們就要比較M(i、j)和M(k、j)的大小,當(dāng)M(i、j)<M(k、j)時(shí),我們將輪廓點(diǎn)j歸入軌跡i,而將另一點(diǎn)g歸入軌跡k、g滿足下式:
M(k、g)=min(M(k、s))、s≠j (11)
在處理第一和第二時(shí)刻的輪廓點(diǎn)時(shí),(5)式用下式代替。
M(i、j)=Fuset1(i、j) (12)
當(dāng)輪廓點(diǎn)出現(xiàn)遮擋現(xiàn)象時(shí),我們可以將預(yù)測(cè)位置作為實(shí)際特征點(diǎn)的位置,從而使軌跡得以延續(xù)。由于前三時(shí)刻圖像對(duì)于輪廓點(diǎn)的跟蹤起著重要的作用,所以我們假設(shè)在前三時(shí)刻無(wú)遮擋現(xiàn)象發(fā)生。
2 實(shí)驗(yàn)分析
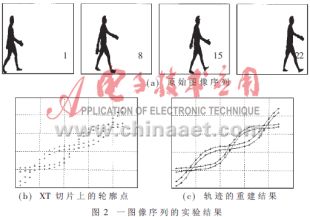
一單目動(dòng)態(tài)圖像序列的實(shí)驗(yàn)情況如圖2所示,圖像為256×256黑白點(diǎn)陣圖像。圖2(a)中列出了該序列的第1、第8、第15和第22幀圖像。在圖像的Y=225處獲得XT切片。圖2(b)顯示了XT切片上的兩下肢的輪廓點(diǎn),當(dāng)(2)式中n(k)的方差σ2n取0.015、(4)式中η(k)的方差σ2x取0.05。評(píng)判因子為λ1、λ2和λ3取0.5、0.25、0.25,則可得到圖2(c)所示的軌跡重建結(jié)果。在下肢交叉運(yùn)動(dòng)時(shí),某些輪廓點(diǎn)可能被遮擋,用Kalman濾波的預(yù)測(cè)位置代替遮擋點(diǎn)的位置,使圖2(c)的軌跡得到了很好的延續(xù)。
通過(guò)輪廓點(diǎn)軌跡的建立,就可以從Kalman濾波中獲得軌跡在每一時(shí)刻的速度和加速度等信息,而這些信息完全反映了人體的步態(tài)情況。由于這一過(guò)程計(jì)算簡(jiǎn)單,計(jì)算機(jī)的計(jì)算負(fù)擔(dān)很輕,所以具有較高的完成速率。
本文摒棄了人體圖像序列分析的復(fù)雜數(shù)學(xué)模型,從圖像學(xué)的某一XT切片入手,從XT切片上離散的輪廓點(diǎn)重建出運(yùn)動(dòng)軌跡。軌跡的重建通過(guò)Kalman濾波的方法,使得輪廓點(diǎn)的遮擋問(wèn)題能通過(guò)預(yù)測(cè)向量的方法得到解決。同時(shí)通過(guò)Kalman濾波,得到了每一時(shí)刻輪廓點(diǎn)運(yùn)動(dòng)的速度及加速度等信息,也就是獲得了步態(tài)參數(shù)。由于本文方法具有較高的完成速率,所以更具實(shí)用價(jià)值。
參考文獻(xiàn)
1 D. Meyer、 J. Denzler and H. Niemann、 Model based extraction of articulated objects in image sequences for gait analysis. IEEE conf. Image Processing、1997;(13): 78~83
2 R. F. Rashid.Twards a system for the interpretation of moving light displays.IEEE Trans.PAMI、1980;12(6) 574~581
3 Z.Chen.Knowledge-guidge visual perception of 3-D human gait from a single image sequence.IEEE Trans. Syst. Man & Cybern.、1985;122(2):148~168
4 A. Baumberg and D. Hogg.Generating spatiotemporal models from exemples.Image and Vision Computing、1996;114:525~532
5 R. E. Kalman.A new approach to linear filtering and prediction problems. Journal of Basic Engineering、1960; 35~46
6 A.Kaufman. Introduction to the theory of fuzzy subsets fundmental theoretical lements. New York:Academic、1975; 1~90