
0 引言
電腦鼠(Micromouse)是智能機電鼠的簡稱,是一個由微處理器控制的集探測、分析、行走功能于一體,能夠自動搜索最佳路徑到達目的地的微型機器人。實際上電腦鼠就是一個電力驅動小車,而這個電動小車是由一個或多個微控制器來控制,通過傳感器和其他各功能器件的配合,具備一定的智能。同時,電腦鼠需擁有探測障礙物、行走、轉彎、加減速和制動等基本功能。
本文是以“IEEE國際電腦鼠競賽”為背景,以美國Luminary Micro公司生產的ARM CortexM3內核的ARM處理器LM3S615為主控制器,控制和檢測紅外傳感器;微控制器根據檢測到的傳感信號,控制電機驅動電路,調整行走,按照載入搜索算法進行迷宮的探測,尋找最短路徑,最終實現從起點到終點的沖刺。
1 電腦鼠系統整體設計方案
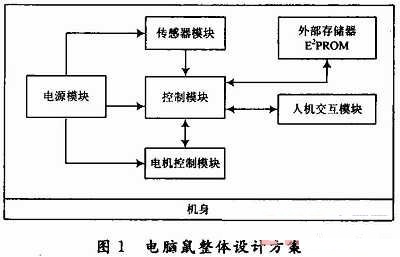
如圖1所示,整個系統可以大致分為以下主要部分:電源模塊,控制模塊,執行機構模塊,傳感器模塊,機身模塊。可以做形象的比喻:電源模塊是電腦鼠的葡萄糖,控制模塊是電腦鼠的大腦,傳感器模塊是電腦鼠的眼睛,機身模塊是電腦鼠的軀干,執行機構是電腦鼠的腿;各模塊之間相互配合使電腦鼠正常工作并尋找到終點。
2 電腦鼠硬件研究與實現
2.1 電腦鼠硬件設計原理
本文研究的電腦鼠是一個跨學科的綜合作品,主要由電源、傳感器、步進電機、控制核心電路、機身5個部分組成,如圖1所示。所以,電腦鼠的硬件設計主要包括電源模塊、微控制器單元模塊、傳感器模塊、電機控制模塊4個部分的設計。其中LM3S615微控制器是電腦鼠的核心,通過檢測到的傳感器信號,結合載入的搜索算法,控制步進電機,實現電腦鼠在迷宮中的行走。
2.2 電源模塊
電源模塊包括供電電池和電壓調節電路。供電電池為2 200 mAh,7.4 V的可充電鋰電池。電機驅動電壓由電源直接供給;LM3S615微控制器需3.3 V電壓供電,電壓調節電路采用Exar公司生產的SPX1117M3-3.3芯片將電源電壓穩至3.3V;電腦鼠所使用的紅外線傳感器工作電壓為5 V,升壓芯片采用Exar公司生產的SP6641A將已經較為穩定的3.3 V電壓升至5 V。
2.3 微控制器單元模塊
本文采用美國Luminary Micro公司生產的CorteX-M3內核的ARM處理器LM3S615,該芯片具有32位RISC性能,具備32 KB單周期FLASH,8 KB單周期SRAM,29個中斷,帶8個優先級。微控制器模塊和其他模塊共同構成一個閉環的反饋控制系統,通過對路程信號、岔口信號和姿勢修正信號的檢測,經由LM3S615進行運算,再將結果賦給電機執行,由此實現電腦鼠的智能穿越迷宮。
2.4 傳感器模塊
2.4.1 傳感器模塊組成
傳感器模塊采用紅外傳感器:紅外線發射對管SIR563ST3F和IRM8601S,紅外線收發對管IR204和PD204-6B。紅外線發射管SIR563ST3F最大輻射角約為30°,工作中心頻率38 kHz;紅外線接受管IRM8601S為一體式紅外線接收頭,最佳工作波長940 nm。可以通過設置不同的發射頻率來實現用一個紅外傳感器完成遠距和近距探測的功能。紅外線發射管IR204和紅外線接收管PD204-6B工作波長均為940 nm,它們固定在兩輪內側,并在輪內貼上黑白碼盤,碼盤隨車輪的轉動而轉動,當傳感器正對著碼盤黑色條紋時,輸出高電平,反之低電平。通過GPIO口中斷檢測電平變化,就可以計算并記錄電腦鼠行走的距離。
2.4.2 傳感器模塊功能
(1)路程檢測。由安裝在兩輪內側的紅外線收發管IR204和PD204-6B,對黑白碼盤條紋進行計數,按照迷宮單元的長度為單位進行路程計數,以記錄電腦鼠在迷宮中的方位坐標,同時還可以精確地實現轉彎。
(2)岔口檢測。岔口檢測由安裝在正前、左前、右前的3個紅外線發射對管SZR563ST3F和IRM8601S實現,工作波長940 nm,實現遠紅外測距功能,探測前、左、右有無障礙。
(3)姿勢修正。姿勢修正由左右2個紅外線發射對管SIR563ST3F和IRM8601S實現,發射信號約30.5 kHz,實現近紅外測距功能,保持電腦鼠在中軸線附近行走,避免撞擊迷宮。值得注意的是,在轉彎過程中不要進行姿勢修正,這樣有可能導致轉彎的角度出現偏差,即電腦鼠只是在前進的過程中才進行姿勢修正。
2.5 電機控制模塊
電機控制模塊主要負責控制電腦鼠的運動,包括電機和電機驅動電路兩部分。電機為兩個兩相四線制步進電機,工作電壓為7.4 V。電機驅動芯片采用BA6845FS,每個芯片包含2個H橋,它的最大驅動電流為1 A,且在輸入邏輯的控制下輸出有3種模式:正向、反向和停止。
3 電腦鼠軟件研究與實現
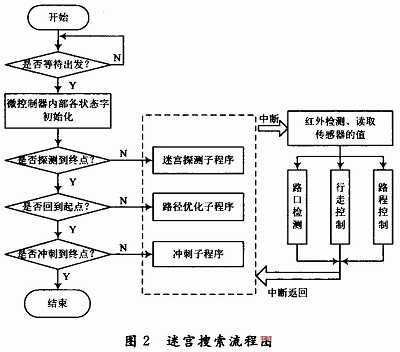
電腦鼠的軟件部分主要用來檢測迷宮環境,傳送控制信號給相應的硬件模塊,對在迷宮中行走的電腦鼠進行制導與導航。其主要由迷宮搜索主程序和其他實現各種功能的子程序組成,主程序主要起到搜索探測迷宮和決策功能,而其他各種功能則是通過調用其相應子程序來實現的,搜索流程如圖2所示。
3.1 迷宮搜索主程序
在沒有預知迷宮路徑的情況下,電腦鼠必須優先探索迷宮中的所有單元格,直到抵達終點為止。做這個處理的電腦鼠要隨時知道自己的位置及姿態,同時要記錄所有訪問過的方塊四周是否有墻壁,并且在搜索過程中盡量避免重復搜索它搜索過的地方。迷宮搜索流程圖如圖3所示。

3.1.1 左手法則
電腦鼠在前進的方向上存在兩條和兩條以上支路時,優先考慮左轉,其次是向前,最后才考慮向右。示意圖如圖4所示。
3.1.2 右手法則
電腦鼠在前進方向存在兩條和兩條以上的支路時,優先考慮右轉,其次向前,最后才向左。示意圖如圖4所示。
3.1.3 求心法則
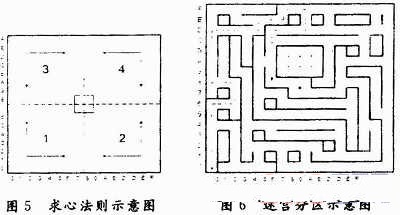
求心法則就是當電腦鼠有至少兩個方向可以選擇時,則優先轉向離中心點最近的方向前進。如圖5所示,把迷宮分為對等區域(1,2,3,4)。可以觀察出,在區域1中,電腦鼠向右和向上更能接近中心,其他區域同理。如果電腦鼠可供選擇的前進方向包含兩個都有可能是離迷宮中心點最近的方向時,優先選擇可以直接前進的方向,其次選擇只用轉90°的方向前進。如果可前進方向都是遠離中心點的方向時,優先選擇直線運行方向,其次選擇轉彎90°的方向。其搜索示意圖如圖6所示。
3.2 其他功能子程序
3.2.1 路程檢測子程序
通過安裝在兩輪內側的紅外線收發管和黑白碼盤來測算電腦鼠走過的路程,確定電腦鼠在迷宮中的位置,并在岔口實現精確的90°和180°轉彎。
3.2.2 岔口檢測子程序
由安裝在正前、左前、右前方向的3個紅外發射管發射38 kHz的信號完成遠距檢測,根據傳感器讀入值,判斷迷宮中障礙信息、路口信息。
3.2.3 姿勢修正子程序
根據左右兩側紅外傳感器接收的反饋信號來判斷電腦鼠偏離迷宮巷道中軸線的程度,通過調整步進電機工作脈沖使某一邊電機減速來修正電腦鼠的行駛方向,使其基本行走在中軸線附近。
3.2.4 轉彎子程序
當電腦鼠檢測到岔口,且需要轉彎時,調用該子程序。
3.2.5 最優路徑子程序
通過對迷宮環境進行搜索檢測,數組自動記錄迷宮地圖信息以及迷宮中每一單元格到起始點的路程,運行最優路徑子程序,就能找到一條從始點到終點的最短路徑。其實質是一種路徑優化算法,常用的算法有等高圖法和蟻群算法。
3.2.6 沖刺子程序
調用此程序可使電腦鼠循著最短路徑從起點以最快的速度沖到終點。
4 結語
本文從分析“IEEE標準電腦鼠”走迷宮比賽規則入手,介紹了電腦鼠硬件系統和軟件系統設計過程和流程。基于電腦鼠的產品具有廣泛的應用場合,譬如自動盲人導引小車、足球機器人、滅火機器人、影像機器人等等。隨著電子技術的發展,對電腦鼠的深入研究將具有很好的發展和應用前景。