
引言
隨著我國道路交通事業(yè)發(fā)展迅猛,汽車保有量已超過1.5億輛,并且保持繼續(xù)增長的趨勢。道路交通運輸?shù)呐畈l(fā)展為我國的運輸事業(yè)提供了強有力的支撐,但同時也帶來了巨大的交通安全" title="安全">安全隱患。道路交通事故已成為各種事故之首,是建立交通運輸安全可持續(xù)發(fā)展的交通體系的重大阻礙。因此,通過技術(shù)" title="技術(shù)">技術(shù)手段建立道路交通安全保障" title="保障">保障系統(tǒng)以減少交通事故是是當(dāng)務(wù)之急。本文在剖析駕駛過程中駕駛員視覺" title="視覺">視覺功能的基礎(chǔ)上,對基于車載" title="車載">車載機器" title="機器">機器視覺的各種汽車安全技術(shù)的研究現(xiàn)狀進行介紹與分析,并展望該領(lǐng)域的發(fā)展趨勢。
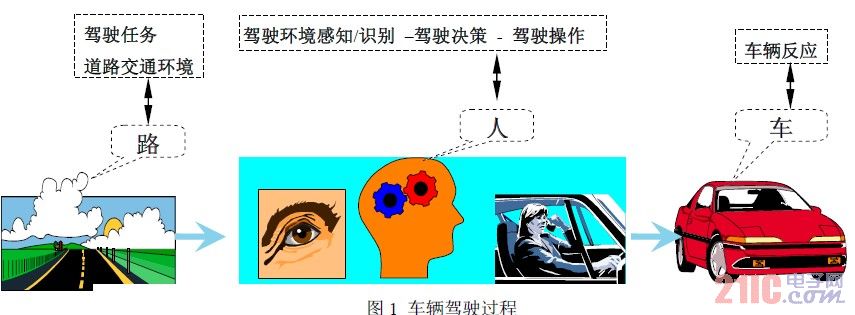
1 駕駛過程描述
根據(jù)人行為的刺激—機體一反應(yīng)經(jīng)典模式,駕駛汽車的行為可分為三個階段,如圖1所示,即感知階段、判斷決策階段和操作階段。在感知階段,駕駛員對實時的交通狀態(tài)信息進行獲取和初步理解,通過感覺器官感知汽車的運行環(huán)境條件;在判斷決策階段,駕駛員結(jié)合駕駛經(jīng)驗和技能,通過中樞神經(jīng)系統(tǒng)分析判斷,確定有利于汽車安全行駛的措施;在操作階段,駕駛員依據(jù)判斷決策,通過運動器官作出實際反應(yīng)和行動。汽車行駛時,駕駛行為是這三個階段所組成的一個不斷往復(fù)進行的信息處理過程,也就是感知作用于判斷決策從而影響到操作。感知階段是保證安全駕駛的基礎(chǔ)。如果沒有感知到準(zhǔn)確和及時的環(huán)境信息,極有可能導(dǎo)致判斷決策和動作的失誤,釀成交通事故。在感知階段獲取信息主要靠視覺、觸覺、嗅覺和聽覺,其中80%以上是通過駕駛員視覺獲取信息的。駕駛視覺直接影響感知信息量的廣度、深度和準(zhǔn)確性,因此,駕駛員的視覺特性與行車安全有直接的聯(lián)系。基于車載機器視覺的汽車安全輔助駕駛技術(shù)旨在提高駕駛員視覺效能,通過改善視覺和駕駛行為的關(guān)系,并輔助駕駛以減少因視覺原因帶來不當(dāng)操作,從而使人-車-路系統(tǒng)更加穩(wěn)定可靠,提高車輛的主動安全性。
2 車輛外部信息的機器視覺輔助駕駛技術(shù)
人眼的作用能力是有限的,獲得通過一系列車輛外部信息的機器視覺輔助駕駛技術(shù)可以提高視覺適應(yīng)性、增加視覺范圍、增強視覺理解深度。從車輛操作過程來劃分,車輛外部信息的機器視覺輔助駕駛技術(shù)的研究包括:駕駛環(huán)境的視覺增強與擴展和駕駛環(huán)境的機器視覺識別。
2.1 駕駛環(huán)境的視覺增強與擴展及顯示
2.1.1 視覺增強
視覺增強系統(tǒng)是智能交通系統(tǒng)中先進車輛控制技術(shù)之一,能夠提供在不同氣候(霧天,雨天,沙塵)、一天中不同的時間的增強駕駛員視覺。一般有兩種增強方法:①通過傳感器感知系統(tǒng)來監(jiān)控道路交通環(huán)境,處理信息而得到實時道路交通狀況,并將相關(guān)的視覺信息提供給駕駛員,從而達(dá)到智能視覺增強的目的;②通過改善駕駛員的視覺環(huán)境,提高駕駛員視覺效果。主要是除去擋風(fēng)玻璃上的雨水和霜、提高汽車前照燈的智能化等,達(dá)到增強低能見度、低照度等不利條件下的駕駛員視覺目的。
利用人眼的視覺特性,采用CCD、紅外傳感器、車速傳感器、GPS及毫米波雷達(dá)等傳感器獲取道路信息,進行信息處理和融合,提取低能見度、低照度下交通環(huán)境的有用信息并剔除噪聲,并以圖像的形式提供給駕駛員。低能見度視覺增強系統(tǒng)最早應(yīng)用在飛機著陸中,二十世紀(jì)80年代末期至90年代初期,人們提出了視景系統(tǒng)(VisionSystem)概念。采用不同手段和不同綜合方法構(gòu)成的視景系統(tǒng)分為:
(1)傳感器視景系統(tǒng)(SensorVS)
前視傳感器實時檢測到的駕駛艙外視見景象,可以由單傳感器生成或多傳感器綜合,其視景接近真實世界的自然景象。
(2)合成視景系統(tǒng)(SVS)
由地形數(shù)據(jù)庫存儲的地形模型構(gòu)建的虛擬視景稱為合成視景(SV)。
(3)增強視景系統(tǒng)(EVS)
傳感器視景和合成視景的疊合稱為增強視景(Enhancedvision)。既有實時探測到的自然視景,也有數(shù)據(jù)庫生成的虛擬視景,兩者匹配疊合,即利用虛擬視景的深刻輪廓線去增強模糊視景,包括了SensorVS和SVS兩個系統(tǒng),它們在惡劣的氣象條件下可以增強窗外視景的可見性[1]。
2.1.2 視覺擴展
視覺擴展是對駕駛員視覺進行補償,運用視覺等傳感器擴展駕駛員視野范圍,如福特公司的CamCar,采用多個微小的攝像機和三個可切換的視頻顯示屏為駕駛員提供了前、后視線,方便停車時的操作,提高在擁擠的交通中行駛的安全性。CamCar的技術(shù)特點包括:
(1)前向攝像機系統(tǒng)。
裝在汽車的兩側(cè),提供繞過障礙物的視野。覆蓋角可達(dá)22°,在300m的距離上相當(dāng)于116m寬的視場。
(2)增強的側(cè)面視野。
CamCar攝像機系統(tǒng)的第二個部分由兩臺后向攝像機組成,這兩臺攝像機不間斷地提供相鄰車道的后向視野。其覆蓋范圍比傳統(tǒng)的后視鏡寬廣得多。這樣,駕駛員在換道前就能對后面駛來的車輛加以監(jiān)測。這種后向視野事實上沒有盲點。后向攝像機裝在汽車側(cè)面,和側(cè)視鏡差不多。其鏡頭可以提供一個較廣闊的視野,每側(cè)攝像機的覆蓋角為49°。
(3)車后全景視圖。
CamCar的后向視野是通過精確設(shè)計安裝在車后的4個微型攝像機得到加強。4個攝像機呈扇形展開,以4個分開的圖像,來捕獲車后一個很寬的區(qū)域內(nèi)的路面情況。這些圖像被送入一個復(fù)雜的計算機程序中進行比較和疊加,然后合成一個無縫的全景視圖,總覆蓋角可達(dá)160°。
2.1.3 顯示技術(shù)
道路環(huán)境圖像顯示和道路環(huán)境報警設(shè)備是駕駛員和車輛間交互的接口,其設(shè)計應(yīng)具有良好的人因特性。目前車載的信息顯示設(shè)備主要有兩種:低頭顯示器(headdowndisplay)和抬頭顯示器(head-updisplay),其中低頭顯示器主要應(yīng)用在車載導(dǎo)航系統(tǒng)和多媒體系統(tǒng)中,其設(shè)計與應(yīng)用比較成熟。如福特公司的CamCar的儀表板上設(shè)有三個視頻顯示屏,一個中心顯示屏和兩個側(cè)面附加顯示屏。顯示的圖像可以根據(jù)具體情況加以改變,以便為駕駛員提供最重要的信息。而抬頭顯示器多用于汽車安全輔助駕駛顯示系統(tǒng)中,可便于駕駛員在汽車高速行駛時,快速瀏覽屏幕上的道路環(huán)境與警示信息,其設(shè)計尚處于開發(fā)、完善階段。
2.2 駕駛環(huán)境的機器視覺識別
駕駛環(huán)境的機器視覺識別是更高一級的汽車安全輔助駕駛技術(shù),通過圖像傳感器識別道路環(huán)境參數(shù)并判別行車的安全性,主要包括:車道檢測、車輛檢測、行人檢測、道路標(biāo)志檢測等。
2.2.1 車道檢測
目前車道檢測多通過道路標(biāo)線、道路邊緣的檢測實現(xiàn),在車道檢測中典型的駕駛安全輔助系統(tǒng)有車道偏離報警系統(tǒng)(LaneDepartureWarningSystem)和轉(zhuǎn)彎減速調(diào)節(jié)系統(tǒng)。
車道偏離報警系統(tǒng)由攝像機、速度傳感器、信息處理系統(tǒng)、方向盤調(diào)節(jié)器、報警系統(tǒng)等組成。車輛一旦有偏離車道的傾向,便會通過指示燈及蜂鳴器向駕駛員報警。當(dāng)根據(jù)駕駛員的轉(zhuǎn)向燈操作斷定為有意識地進行車道變更時,便會暫時停止報警。可切斷系統(tǒng)開關(guān),但車輛再次起動時系統(tǒng)便會自動開始工作。車道偏離報警系統(tǒng)多采用單目攝像機探測道路標(biāo)線圖像,為增加系統(tǒng)檢測道路標(biāo)線的可靠性,日本汽車研究所ITS中心探索利用雙目CCD攝像機和實時差分GPS系統(tǒng)檢測運行車輛偏離道路標(biāo)線情況。
2.2.2 車輛檢測
車輛檢測是利用各種傳感器探測前方、側(cè)方、后方的車輛的信息,包括前后方車輛速度、位置以及障礙物的大小位置等。與此相關(guān)的汽車駕駛安全輔助支持系統(tǒng)有自適應(yīng)巡航控制系統(tǒng)(ACC,adaptivecruisecontrolsystem)、前向碰撞預(yù)警系統(tǒng)(FCW,F(xiàn)orwardCollisionWarning)、橫向碰撞預(yù)警系統(tǒng)(LDW,LateralDriftWarning),泊車輔助系統(tǒng)(ParkingAssistanceSystem)。在ACC和FCW中采用77GHZ微波雷達(dá)或攝像機采集道路前方信息,并融合道路幾何線形、電子地圖數(shù)據(jù)作為汽車巡航控制的輸入信號或顯示給駕駛員。在LDW中采用攝像機、前方探測雷達(dá)、側(cè)向探測雷達(dá)采集本車前向和側(cè)向信息,并融合道路寬度等數(shù)據(jù),作為LDW系統(tǒng)輸入數(shù)據(jù)。在泊車輔助系統(tǒng)中采用超聲傳感器或雷達(dá)探測本車后方與側(cè)方的障礙物信息,并顯示給駕駛員。在日本的ASV(AdvancedSafetyVehicle)、美國的IVI(IntelligentVehicleInitiative)、歐洲的e-Safety項目中ACC、FCW、LDW、泊車輔助系統(tǒng)等均有研究。
2.2.3 交通標(biāo)志的探測
道路交通標(biāo)志為重要的道路交通安全附屬設(shè)施,可向駕駛員提供各種引導(dǎo)和約束信息。
駕駛員實時地正確地獲取交通標(biāo)志信息,可保障行車更加安全。在汽車安全輔助駕駛系統(tǒng)中交通標(biāo)志的探測是通過圖像識別系統(tǒng)實現(xiàn)的。戴姆勒·克萊斯勒公司目前正開展新一代圖像識別系統(tǒng)研究,該系統(tǒng)在道路標(biāo)志方法上首先對形狀進行判斷,然后再讀取上述形狀中的文字和圖形信息,以做出最終判斷。在難以對標(biāo)志進行判斷時,駕駛員也可利用事先記錄的道路標(biāo)識相關(guān)電子地圖數(shù)據(jù)進行識別。寶馬公司在ADAS(AdvancedDriverAssistanceSystems)項目研究中,也利用圖像識別技術(shù)進行了交通標(biāo)志的研究,此外日本豐田公司也積極進行交通標(biāo)志自動識別系統(tǒng)的研發(fā)。國外,許多研究人員在交通標(biāo)志圖像識別算法研究中進行了多方面的探索。交通標(biāo)志圖像識別包括交通標(biāo)志定位(即確定感興趣區(qū)域)、分類器設(shè)計等幾個過程。交通標(biāo)志與背景的顏色以及交通標(biāo)志的形狀在交通工程標(biāo)準(zhǔn)中有明確的規(guī)定,因此可根據(jù)交通標(biāo)志顏色和形狀進行定位研究。由于交通標(biāo)志種類多,拍攝交通標(biāo)志圖像環(huán)境影響因素多,在交通標(biāo)志模式分類器設(shè)計研究中多為非線性分類器。交通標(biāo)志形態(tài)骨架,并利用匹配算法識別交通標(biāo)志。
2.2.4 行人檢測技術(shù)
車輛輔助駕駛系統(tǒng)中基于計算機視覺的行人檢測是指利用安裝在運動車輛上的攝像機獲取車輛前面的視頻信息,然后從視頻序列中檢測出行人的位置。基于計算機視覺的行人檢測系統(tǒng)一般包括ROIs分割和目標(biāo)識別兩個模塊。ROIs分割的目的是快速確定行人可能出現(xiàn)的區(qū)域,縮小搜索空間,目前常用的方法是采用立體攝像機或雷達(dá)的基于距離的方法,其優(yōu)點在于速度比較快。目標(biāo)識別的目的是在ROIs中精確檢測行人的位置,目前常用的方法是基于統(tǒng)計分類的形狀識別方法,其優(yōu)點在于比較魯棒。由于它在行人安全方面的巨大應(yīng)用前景,歐盟從2000年到2005年連續(xù)資助了PROTECTOR和SAVE-U項目,開發(fā)了兩個以計算機視覺為核心的行人檢測系統(tǒng);意大利Parma大學(xué)開發(fā)的ARGO智能車也包括一個行人檢測模塊;以色列的MobilEye公司開發(fā)了芯片級的行人檢測系統(tǒng);日本本田汽車公司開發(fā)了基于紅外攝像機的行人檢測系統(tǒng);在國內(nèi)西安交通大學(xué)、清華大學(xué)、吉林大學(xué)也在該領(lǐng)域做了許多研究工作。
3 車輛內(nèi)部信息的機器視覺輔助駕駛技術(shù)
車輛內(nèi)部信息的機器視覺輔助駕駛技術(shù)是通過車載的視像機判別駕駛員的狀態(tài)、位置等信息,實施必要的安全保障措施,包括駕駛員視線調(diào)節(jié)以及駕駛疲勞檢測等。
3.1 視線調(diào)節(jié)
駕駛員的視線調(diào)節(jié)是使每位駕駛員的眼睛處于同樣的相對高度上,保證提供一個對路面和周圍車道的無阻礙視野和最好的視見度,從而保障駕駛安全。該技術(shù)包括:
(1)眼位傳感器可以測定駕駛員眼睛的位置,然后據(jù)此確定、調(diào)節(jié)座椅的位置;
(2)電機將座椅自動升降到最佳高度上,為駕駛員提供能夠掌握路面情況的最佳視線;
(3)電機自動調(diào)整轉(zhuǎn)向盤、踏板、中央控制臺甚至地板高度,提供盡可能舒適的駕駛位置。在一些高檔轎車上視線調(diào)節(jié)系統(tǒng)已經(jīng)得到應(yīng)用,如沃爾沃視線調(diào)節(jié)系統(tǒng),由位于風(fēng)窗上飾板內(nèi)的一個視頻攝像機掃描駕駛員的座椅區(qū)域以查找一個代表駕駛員臉部的模式,進而對駕駛員臉部進行掃描以確定其眼睛的位置,然后再找出各眼的中心,完成這三步工作時所需要的時間不到1s。
3.2 疲勞與分神檢測
由于疲勞駕駛是重大交通事故主要原因,國內(nèi)外研究機構(gòu)紛紛開展該領(lǐng)域的研究。疲勞的與清醒的駕駛相比,較有特異性的指標(biāo)是:方向盤的微調(diào),頭部前傾,眼瞼的眨動、甚至閉合。在目前駕駛疲勞檢監(jiān)測系統(tǒng)研究中,多采用車載機器視覺系統(tǒng)監(jiān)測人體姿態(tài)和操作行為信息,判別疲勞狀態(tài)。在歐洲的e-Safety項目中開發(fā)了AWAKE駕駛診斷系統(tǒng)。該系統(tǒng)利用視覺傳感器和方向盤操縱力傳感器實時獲取駕駛員信息,并利用人工智能算法判斷駕駛員的狀態(tài)(清醒、可能打瞌睡、打瞌睡)。當(dāng)駕駛員處于疲勞狀態(tài)時,通過聲音、光線、振動等刺激駕駛員,使其恢復(fù)清醒狀態(tài)。文獻(xiàn)[34]通過自行開發(fā)的專用照相機、腦電圖儀和其他儀器來精確測量頭部運動、瞳孔直徑變化和眨眼頻率,用以研究駕駛疲勞問題。研究結(jié)果表明:
一般情況下人們眼睛閉合的時間在0.12~0.13s之間,駕駛時若眼睛閉合時間達(dá)到0.15s就很容易發(fā)生交通事故。
4 結(jié)語
駕駛員80%以上信息通過視覺獲得,針對駕駛員視覺的不足,開發(fā)基于車載機器視覺的汽車安全輔助駕駛系統(tǒng)一直是智能交通的研究熱點之一,文中對該領(lǐng)域技術(shù)現(xiàn)狀進行綜述,結(jié)論如下:
1)分析駕駛操作過程,并對駕駛操作的三個階段進行描述;
2)根據(jù)信息獲取范圍將汽車安全輔助駕駛分為:外部信息的機器視覺與內(nèi)部信息的機器視覺技術(shù)。外部信息的機器視覺技術(shù)分為:視覺增強、視野擴展、道路環(huán)境理解,內(nèi)部信息的機器視覺技術(shù)分為:視線跟蹤與駕駛疲勞監(jiān)測,綜述汽車安全輔助駕駛系統(tǒng)中機器視覺技術(shù)的研究現(xiàn)狀;
3)分析了汽車安全輔助駕駛系統(tǒng)中機器視覺技術(shù)當(dāng)前研究不足,指出:低能見度駕駛員視覺增強方法、道路環(huán)境理解信息融合以及駕駛疲勞檢測等技術(shù)需進一步開展研究。