張小江 高秀華 張永智
0 引言
機器人仿真技術是計算機技術、機器人學和計算機圖形學相結合的產物。借助于機器人的實體圖形對機器人的運動進行仿真,可形象逼真地反映機器人工作運動的全過程,可以實現機器人機構和控制器的優化設計,規劃出最優的運動軌跡。機器人的動態圖形仿真對機器人的設計、制造、試驗及其應用具有重要的指導意義。機器人仿真系統作為機器人設計和研究過程中安全可靠、靈活方便的工具,發揮著越來越重要的作用。目前,離線仿真在國內雖然有些初步研究,但實際應用很少。可以預見隨著機器人在我國的大量應用,離線仿真技術的研究和應用不但迫在眉睫,同時它的成功研究和應用也將有廣闊的市場前景。
1 DELMIA及其IGRIP
DELMIA集成解決方案在全球領先的企業與科研機構中得到廣泛的應用。在航空航天、汽車、造船、重型設備、日用消費品等各個行業發揮著重要的作用。DELMIA公司系列軟件以基于物理的虛擬設計與制造及虛擬機器人等模塊表現最為優異。
DELMIA軟件在機器人應用仿真方面處于世界領先地位。DELMlA軟件能顯著降低人機時和工程準備時間,提高仿真的精度。DELMIA/IGRIP是專業機器人模擬軟件,利用IGRIP可快速和圖形化地構造各種應用工作單元作業,同時DELMIA/IG—RIP能很容易導人CAD數據,自動碰撞偵測功能能避免破壞減小風險。不管是對單個機器人作業單元還是整個工廠生產線,IGRIP都能提供相應的解決方案以提高制造質量、精度和效益。
2 機器人仿真
在機器人仿真研究中,仿真系統由以下幾部分構成:三維幾何模型,運動計算,軌跡規劃,運動圖形仿真等。根據KUKA240—2型機器人結構特點,機器人仿真步驟如下。
2.1機器人任務的設定
工業機器人一般有6個自由度,要實現機器人運動學的逆解是一項十分繁重的工作。DELMIA/IGRIP軟件能成功解決這困難。通過“RobotOf—flineProgramming”模塊中的“ImporttagGroupInfo”導入機器人路徑中的各點。在“RobotMo—tion”對話框中的“TargetAttributes”可看到機器人對應點運動學逆解的各種解,DELMIA/IGRIP對這些逆解進行r奇異性分析,可從中選擇恰當逆斛。
2.2機器人軌跡規劃
文中采用軌跡規劃方法為拋物線捅值。假定兩端的過渡域具有相同的持續時間t,且具有大小相等方向相反的恒定加速度。要保證軌跡連續光滑,即要求拋物線的終點速度必須等于線性段的速度。
機器人各關節運動速度經歷3個階段:機器人在第l階段從初速度作勻加速運動,在2階段作勻速運動,第3階段作勻減速運動,直至角速度為0。為使機器人運動平穩,保證機器人在完成某項任務的加速度最小,文中采用的方法為:機器人運動過程中前一段作勻加速運動,后一段做勻減速運動中間不經過勻速運動階段(即機器人關節運動只經過第l,3階段)。這樣能保證機器人完成同一項任務的加速度比中間有勻速運動的加速度小。在這種前提下則下列條件成立:
文中選用的時間為4S,在機器人的作業空間中選取了3個點,分別為tag1,tag2和tag3。
2.3機器人防碰撞和干涉檢測
防碰撞檢測的目的是分析機器人和周圍環境可能出現的碰撞問題。干涉檢測是分析機器人在工作過程中有可能出現的奇異性及速度加速度等超限問題。這是保證機器人能正常工作的必要條件。機器人的防碰撞檢測問題比較復雜,在其設計中是一個非常棘手、但又必須妥善解決的問題。
利用DELMIA/IGRIP的標準自動碰撞偵測功能允許用戶生成多個碰撞和接近隊列以避免碰撞,而且可由自動路徑規劃器,生成避碰機器人軌跡。可利用也可檢測機器人速度和加速度超限問題,效率高,準確度好,解決了實際工作中的難題,使機器人碰撞問題在設計過程中得到有效的解決。在DELMIA/IGRIP環境中防碰撞檢測的步驟是:在“SimulationAnalysisTools”工具欄中依次選擇“碰撞檢測(開啟)”,對機器人進行碰撞檢測;“A—nalysisConfiguration”中的“DeviceSettings”對機器人工具的速度加速度等進行檢測;AnalysisCon—figuration”中的“RobotSettings”對機器人的線速度、角速度、線加速度和角加速度進行檢測;然后選擇“CheckClash”對機器人進行干涉檢測。
2.4運動學仿真分析
恨據機器人工作的特點,一般把饑器人各關節的軌跡,機器人末端的軌跡和機器人末端的位姿作研究對象,創建測量曲線,進行運動學仿真分析。產生測量曲線的方法:點擊“SimulationAnaly—sis"Fools”中的“DataReadout”;在彈出窗口點擊“Sensors”按鈕,并選擇相應的機器人;在彈出的“Sensormanagement”選擇需要測量的曲線,如各關節的軌跡、機器人末端的軌跡、機器人末端的位姿等;對機器人進行仿真,在“SpreadSheet”得到需要測量的一系列數值,點擊“Graphics”便得到所要的各個曲線。我們也可以在“Customizedcurves”來繪制其它關系曲線。
本文以KUKA240—2型搬運機器人為研究對象,對機器人的運動采用DELMIA/IGRIP進行了分析,得到機器人各關節的軌跡,如圖1~圖6所示,機器人末端的運動軌跡,如圖7~圖9所示,機器人末端的空間軌跡如圖10所示。
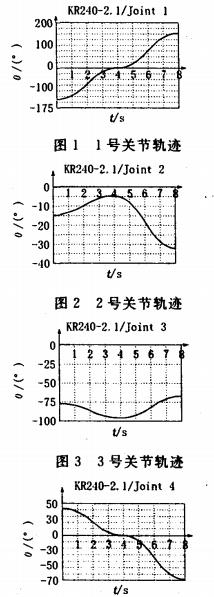
圖 4 4號關節軌跡
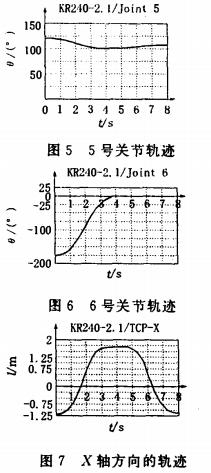
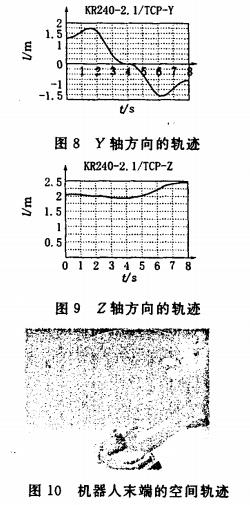
從圖中可以看出:機器人各關節在整個運動過程中的情況與所設定的初始條件吻合,整個曲線與各個工況運動一致。機器人末端的姿態一般用3×3的旋轉矩陣來表示,DELMIA/IGRIP采用RPY方法,用這種方法,通過3個量就可以表示機器人的姿態。仿真結果如圖11~圖13所示。
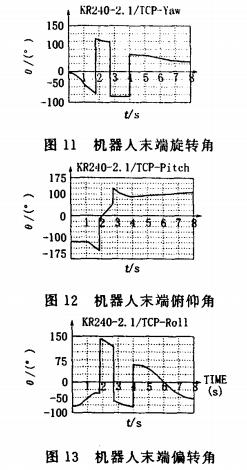
從DELMIA/IGRIP對工業機器人的仿真分析來看,我們很清楚地得到機器人關節空間的軌跡、機器人末端的空間軌跡及其姿態,并且利用DEL—MIA/IGRIP能避免機器人的碰撞。
3 結束語
機器人的運動仿真是機器人技術的一個重要組成部分,機器人仿真也是機器人離線編程系統中十分重要的一環。應用DELMIA/IGRIP軟件的建模仿真模塊,成功解決了機器人在工作過程中無法直接觀察空間運動狀況的難題,是直觀方便地進行機器人仿真的有益嘗試。
參考文獻:
[1]北京賽四達科技有限公司.DELMIA公司及虛擬制造解決方案[z].2003.
[2]朱世強.王宣銀.機器人技術及其應用[M].杭州:浙江大學出版社,2600.
