1 前言
隨著物流、食品和石化等行業的不斷發展,碼垛機器人發揮著越來越重要的作用,它不僅可以準確、高效地完成碼垛作業,而且可以降低工人的勞動強度,提高生產效率。
目前,國外主要機器人廠家,如ABB、FANUC等,均有較為完善的碼垛機器人產品系列,壟斷了國內外市場;而國內,碼垛機器人的研究起步不久,還未有成熟的,產業化的碼垛機器人產品出現。本文研究了ER300碼垛機器人結構特點及運動空間,展現了一般碼垛機器人與六自由度機器人的結構差異和運動空間形成方式。
2 碼垛機器人機構分析
基于碼垛任務的實際需要,碼垛機器人通常具有四自由度。與一般垂直型六自由度串聯工業機器人的結構不同,碼垛機器人通過在肩部串聯兩個平行四邊形結構使得腕關節旋轉軸始終與地面垂直,從而使被抓持物始終處于水平狀態;腕部結構簡單,沒有復雜的姿態調整結構。目前,碼垛機器人使用較為廣泛的結構之一,如圖1所示:

將圖1中三維模型進一步簡化為桿件連接(略去了1軸和平衡缸),如圖2所示,A點為機器人2軸,B點為復合鉸鏈,通過三角架分別與大臂和大臂副桿,與小臂和小臂副桿組成串聯的平行四邊形結構,使得運動過程中手腕體回轉軸始終與地面保持垂直,從而手腕體中心D點相對小臂末端C點位置也保持不變。
此外,ER300機器人采用了將3軸電機和減速器均固定在三角架上的安裝方式。該種連接方式使得三角架和大臂副桿承受了小臂、手腕體和負載等組件關于3軸的轉矩M,但小臂不與大臂耦合旋轉,在很大程度上簡化機器人的運動方式和控制方法。
鑒于ER300碼垛機器人沒有復雜的耦合運動,本文不采用傳統的D-H方法進行計算。為研究計算D點運動可達空間,這里將全局坐標系原點O0固定在1軸與地面的交點處,Y0與1軸重合,其余局部坐標系如圖2所示

在全局坐標系中,各關節點坐標與關節旋轉角之間的換算關系如下:
其中,R、H分別為1軸回轉半徑和底座高度;L2、L3分別為大臂和小臂長度;![]() 、
、![]() 分別為大臂相對Y1軸旋轉角度,小臂相對X2軸旋轉角度,本文規定逆時針旋轉為正向;S為
分別為大臂相對Y1軸旋轉角度,小臂相對X2軸旋轉角度,本文規定逆時針旋轉為正向;S為![]() 長。
長。
零位時,2軸和3軸的旋轉范圍分別,。為保護碼垛機器人末端平行四邊形結構,防止桿件間發生干涉,ER300為小臂與三角架之間設定的安全角度為(如圖3所示)。因此,小臂旋轉角范圍與大臂旋轉角函數關系為:

圖3展現了在2軸兩個極限位置時,小臂與三角架之間的最大和最小的安全角度。
3 ADAMS運動模擬
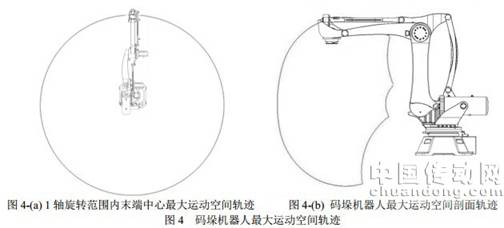
ADAMS是對機械系統的運動學與動力學進行仿真計算的經典軟件。為進一步展示碼垛機器人的運動空間形式,本文將solidworks建立的碼垛機器人三維模型導入ADAMS,對機器人進行了運動模擬,其最大運動空間剖面軌跡如圖4所示,該軌跡線反應了一般碼垛機器人的最大運動空間結構。
在完成上述圖4-(b)的模擬中,2軸和3軸Motion驅動角速度如圖5所示:
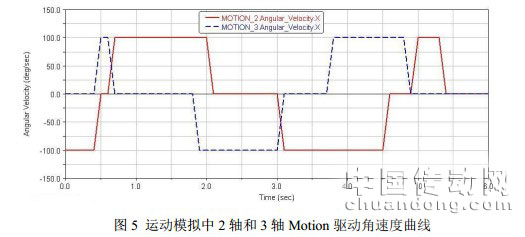
結合圖4和圖5可進一步看出,ER300機器人特定的結構使其在運動過程中,大小臂之間沒有復雜的耦合運動,簡化了機器人運動方式及控制方法。
仿真結果也顯示,在機器人運動過程中,大臂副桿在某些位置承受了較大的拉力。由理論分析可知,當轉矩M不變,大臂副桿的拉力F與其關于3軸的力臂L成反比例函數,從而在某些特定位置,力臂L的較小變化會導致F大幅變化。因此,在機器人設計過程中要充分保證大臂副桿及其組件的強度與剛度,以保證機器人的可靠性和準確性。
4 運動空間數值計算
為準確計算并驗證碼垛機器人的運動可達空間,本文采用了ER300碼垛機器人的基本參數:R=400mm,H=835.5mm,L2=1250mm,L3=1300mm,W=225mm。利用matlab編程計算并繪制了碼垛機器人手腕體D點的理論運動可達空間剖面,如圖6所示:
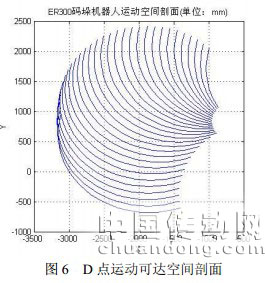
計算結果顯示,當時![]() ,機器人末端中心D點達最大工作空間最高點;當時
,機器人末端中心D點達最大工作空間最高點;當時![]() ,機器人末端中心D點達最大工作空間最低點;當
,機器人末端中心D點達最大工作空間最低點;當![]() 時,機器人達最大臂展位置,這三點位置決定了碼垛機器人本體分別在垂直和水平方向上的最大碼垛范圍,是衡量碼垛機器人工作性能的重要參數。
時,機器人達最大臂展位置,這三點位置決定了碼垛機器人本體分別在垂直和水平方向上的最大碼垛范圍,是衡量碼垛機器人工作性能的重要參數。
再與ADAMS模擬的運動軌跡點坐標計算結果對比,并分別考慮ADAMS模擬的軌跡求解精度誤差和離散計算方法的誤差因素,模擬結果和理論計算結果基本和設計目標一致,均能夠達到最大臂展為3175mm,Y方向搬運高度3104mm的要求。
分別與ABB的IRB660-180、KUKA的KR180-2PA和KAWASAKI的ZD130S工作空間對比,結果顯示在ER300的基本參數下,運動空間與上述同類機器人基本重合,能夠達到市場的一般需求(臂展、碼垛高度等)。
5 結論
本文通過對ER300碼垛機器人機構的分析,展現了一般碼垛機器人的桿件關系、運動形式;說明了該種機構優點的同時,也點出了其在設計過程中需要注意的問題;分別模擬和計算了碼垛機器人的最大運動空間,驗證了機器人的運動形式。
本文對碼垛機器人的機構和運動分析,為該類機器人的研發提供了一定的理論依據和現實參照。
