
摘 要: 設計了一種以DSP為處理核心的高精度的光學探測" title="光學探測">光學探測陀螺穩定系統" title="穩定系統">穩定系統。介紹了以CCD 圖像和旋轉變壓器測角組成系統位置閉環,以光纖速率陀螺" title="速率陀螺">速率陀螺作為慣性速率反饋傳感器組成系統速率閉環的復合控制系統以及系統的軟硬件設計。
關鍵詞: 陀螺穩定平臺 光學探測 DSP
?
光學探測陀螺穩定系統作為一種高精度的瞄準線穩定系統,可以提供對地、對空目標的全景式大范圍探測和跟蹤。既可作為獨立的光電觀瞄系統用于偵察任務,也可作為火控系統的組成部分完成戰場作戰任務。其重要功能是隔離載體角運動,使探測器在慣性空間內保持穩定;能夠響應指令信號,在一定角度范圍內對目標進行搜索,在人工識別鎖定后能夠按探測器信號自動跟蹤目標,并給出方位、俯仰信息。可實時對地面敏感地區進行監視,執行晝夜監視、海岸巡邏、戰場偵查等特定任務。在國防和民用領域具有廣闊的應用前景。
1 系統結構與設計指標
1.1 系統結構
系統主要由平臺部件、電子部件、顯控部件三部分組成。
平臺部件包括框架、俯仰/方位電機、大/小視場CCD、激光測距儀、俯仰/方位旋轉變壓器(以下簡稱旋變)。CCD攝像機安裝于相互正交的內、外兩個框架上,由兩個力矩電機控制可以在航向和俯仰兩個自由度的方向上掃描。在內、外框架上分別由速率陀螺感測方位和俯仰運動,其輸出送入穩定系統調節器,再經功率放大后至力矩電機,使框架按照指令旋轉(掃描)或穩定瞄準線。
電子部件包括系統主板、電視跟蹤器、電機驅動及數據采集保持電路。電子部件根據系統的要求對系統的航向、水平、俯仰、橫滾和方位進行修正和補償控制;根據陀螺儀的溫度漂移特性曲線進行溫度補償控制;自動采樣、監測系統信號;實現系統主要參數的常量有選擇地動態顯示。
顯控部件包括控制盒、工控機。主要用于顯示由CCD攝像機攝入的圖像及系統狀態信息,并完成搜索、鎖定、解鎖等操作。
1.2 系統主要設計指標
穩定軸相關設計指標如下:方位、俯仰軸角速度大于40°/s,方位、俯仰軸角加速度大于60°/s2。
靜態下對不大于3 000gcm的擾動力矩,角度波動不大于30″且穩定后無靜差。
穩定隔離精度技術指標為:搖擺臺在擺幅為3°、頻率為1Hz的正弦擾動下,平臺俯仰通道擺幅應小于2′;搖擺臺在擺幅為2°、頻率為1Hz的正弦擾動下,穩定平臺方位通道擺幅應小于2′。
2 控制系統設計
當平臺受到載體的運動干擾時,如果光軸作用點距離較遠,即使相對慣性空間產生很小的誤差角偏移,也會使遠距離外的跟蹤點脫離視場。因此系統主要針對干擾力矩下平臺角度輸出穩定后無靜差這一要求來進行設計。
在一般的速率反饋方案中,校正環節選用PID校正僅能實現系統角速度無靜差,不能實現角度無靜差。如果要讓系統角度輸出無靜差,則需要在校正環節中含有雙重積分環節,因此設計了在速率陀螺反饋的基礎上采用PII2校正環節的控制方法。由于直流力矩電機電樞電感值通常非常小,忽略其時間常數的影響,模型簡化后的穩定回路控制框圖如圖1所示。
(3) 主導極點:必須滿足特征多項式中一對具有復實部的共軛" title="共軛">共軛復根為系統的主導極點,應滿足α>5。
采用極點配置的方法來確定(比例-積分-二重積分)校正環節的三個系數,可得:
kp=7.2,ki=245,ki2=6 500,根據上述參數,施加一個1 000gcm的干擾力矩,在MATLAB中仿真的結果顯示系統調節時間及角度靜差均滿足要求,但系統超調過大。增大系統的開環增益,將系統校正環節中kp、ki、ki2 三個參數均放大三倍,觀察閉環零極點圖,發現系數放大后,共軛復根的復實部并未發生較大變化,而其虛部變小,這可削弱系統動態特性中的正弦振蕩從而減小超調。同時系數放大三倍后復實軸上的極點更加遠離共軛復根,從而使得共軛復根的主導極點的地位更為加強,系統的特性更接近設計期望的特性。同樣1 000gcm擾動力矩下,系統調節時間及角度靜差均滿足要求。方位軸3 000gcm擾動力矩下角度輸出如圖2所示(在60秒時刻施加干擾力矩,縱坐標單位角秒,橫坐標單位秒)。
在系統反饋控制中,內環是一個力矩電機的電流環,用于輸出穩定無差的轉矩。次內環為框架慣性速率環,最外環為位置跟蹤環。慣性速率環的反饋元件為速率陀螺,測量框架相對于慣性空間的角速率。位置跟蹤環由旋變來完成角度的測量。陀螺穩定系統是一個力矩平衡系統,由陀螺感測擾動力矩引起的角運動,通過反饋回路產生一個控制力矩來抵消擾動力矩,從而達到穩定的目的。在本陀螺穩定平臺控制系統中, 電機的控制模式采用轉矩控制模式,使轉矩(電流)環的輸出電流值與閉環的輸入電壓給定值成比例關系,這樣可以顯著提高慣性速率環的控制效果,從而提高穩定精度。
3 系統硬件設計
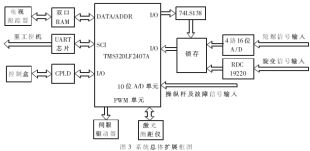
控制器核心選用TI公司TMS320LF2407A數字信號處理器,采用模塊化主計算機板、顯示控制板、A/D" title="A/D">A/D 板、R/S 板及圖像跟蹤板。系統資源有一定冗余度,提高了系統的可靠性。總體擴展框圖如圖3所示。
3.1 陀螺信號輸入接口
陀螺選用俄羅斯Fizoptika公司的光纖陀螺VG941-3AM,用于測量負載框架相對于慣性空間的角速率,輸出模擬電壓信號(0~3V),陀螺信號通過信號處理電路轉成與A/D 芯片匹配的輸入電平。本系統選用2 片ADI公司的16位A/D芯片ADS7805U,可同時采樣,轉換時間為4μs,滿足系統要求。A/D轉換后的16位信號送到兩片鎖存器(SN74HC574)中,由DSP控制74LS138選通鎖存來讀取陀螺信號。
3.2 直流力矩電機伺服驅動接口
電機功放電路選用IR公司的電機驅動芯片IR2104。IR2104是一種高電壓、高速度的功率MOSFET和IGBT驅動器,工作電壓10~20V。系統使用兩片IR2104控制四片N溝道的IGBT(IRF540N)組成一個全橋驅動電路控制一臺直流力矩電機。IR2104通過HO輸出分別控制全橋驅動電路的上半橋Q1、Q3的導通與關斷,而IR2104的LO輸出分別控制全橋驅動電路的下半橋Q2、Q4的導通與關斷,從而達到控制電機轉速與正反轉的目的。電機驅動接口如圖4所示(僅畫出一路)。
3.3 旋轉變壓器信號接口
在本系統中,選用DDC公司的專用RDC模塊19220,接收來自旋變粗、精通道的激磁信號,其中精通道的bit4-bit11轉換后直接送到低位鎖存中,bit1-bit3送到中位鎖存的低三位,精通道的bit1-bit5再和粗通道在MD27C256中精粗精組合后送到中、高位鎖存,形成旋變的18位數據,分辨率為4.94″。單路旋變接口實現如圖5所示。
4 系統軟件設計及功能
軟件設計包括初始化、自檢、控制算法、故障處理、以及各功能模塊的編寫,考慮到穩定模塊的實時性比較高,整個系統程序采用匯編語言設計編寫,伺服采樣周期為1ms。
系統控制命令既可以由控制盒發出,也可以由上位機發出。上位機還可以設定如測漂參數、位置指令參數等以完成各種系統監測所需的參數設置,同時上位機還接收、顯示存儲來自平臺的包括陀螺、旋變、電機等各種實時信息,用于數據處理和分析判斷。軟件采用模塊化設計,方便軟件的調試,可擴展性、可移植性強。系統軟件框圖如圖6所示。
跟其他平臺相比,本系統的一大特色是功能比較豐富,系統軟件具有穩定測漂、旋變鎖定 、位置指令、目標搜索、光電跟蹤等五種狀態,還可完成諸如負載能力試驗、模擬搖擺試驗、帶寬預測試等系統試驗。
(1) 旋變鎖定
系統根據旋變信息對平臺施矩,將其控制到旋變的電零位,旋變鎖定狀態持續5秒鐘后結束并自動轉入陀螺穩定狀態。
(2) 穩定測漂
操作員鍵入采樣周期和采樣時間后,系統進入穩定測漂狀態,測漂完成后自動補償陀螺漂移。
(3) 位置指令
系統接收到目標的緯度、經度、高度三個參數,然后從載體系統中讀入自身的橫滾角、俯仰角、方位角三個參數,根據這六個參數計算得出自身所要轉動的俯仰、方位角度,然后控制平臺電機轉動到相應位置。

(4) 目標搜索
此時由操縱桿控制俯仰、方位兩個電機的運動,DSP接收到目標搜索的指令碼后,分別取出地面控制臺給出的俯仰、方位兩個電機的速度值,然后按照操縱桿給出的俯仰、方位兩個電機的速度值控制平臺轉動,進行目標搜索。
(5) 光電跟蹤
系統接收到光電跟蹤的指令碼,選擇相應的跟蹤方式,然后根據電視跟蹤器傳來的俯仰、方位的脫靶量控制兩個電機平臺運動,跟蹤目標點。
5 系統實驗及結論
5.1靜態穩定精度檢測
開機使平臺進入穩定狀態,分別給方位、俯仰軸添加負載。3 000gcm擾動力矩下,系統旋變角度輸出如圖7所示(在60秒時刻施加干擾力矩),滿足設計要求。
5.2 動態穩定精度檢測
開機使平臺進入穩定狀態,在俯仰穩定框安裝雙面反射鏡,調整好雙面反射鏡、平行光管和光電觀測儀,使方位穩定軸進入穩定功能狀態,使方位搖擺軸按照正弦波作搖擺運動,觀察光電觀測儀的讀數,如果小于要求值,即滿足要求。實測穩定臺方位軸搖擺幅度為0.2′,俯仰軸搖擺幅度為0.3′,遠小于設計指標,滿足技術指標要求。
本文詳細論述了瞄準線穩定高精度系統及其軟硬件設計。系統采用經典的位置速率雙環控制結構,選用DSP 作為數字控制系統的核心,組成高精度瞄準線穩定系統。對各項動、靜態性能指標進行了測試, 達到了預期設計指標。
參考文獻
[2]?JAMES D, STEPHEN S A, JIM S, et al. High performance gimbal control for self2 protection systems[C].Proceedings of SPIE. 1998,3365:77-86.
[3] 楊海峰,李奇,姬偉. 高精度伺服穩定跟蹤平臺數字控制器研制[J].東南大學學報(自然科學版)增刊,2004,34:96-100.