
摘 要: 由于異步電機" title="異步電機">異步電機的矢量控制" title="矢量控制">矢量控制算法比較復雜,要達到高性能的目的,必須利用雙DSP" title="DSP">DSP,使其系統的整體性價比下降。為解決這一問題,本文利用現場可編程門陣列(FPGA" title="FPGA">FPGA),設計一種智能控制器來完成一系列復雜控制算法,實現了異步電機矢量控制速度控制器的專用集成電路。該電路對研制具有自主知識產權的矢量控制異步電機變頻調速專用芯片有著十分重要的意義。
關鍵詞: 異步電機 矢量控制 現場可編程門陣列 智能控制器 控制算法
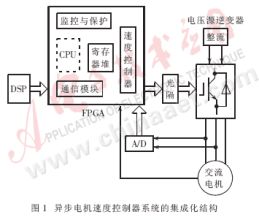
可靠性和實時性是對控制系統的基本要求,最初的電機控制都是采用分立元件的模擬電路。隨著電子技術的進步,以脈寬調制(PWM)為基礎的變頻調速技術已廣泛應用于電機控制中。在數字化趨勢廣泛流行的今天,集成電路甚至電機控制專用集成電路已大量應用在電機控制中。特別是最近幾年興起一種全新的設計思想,即基于現場可編程門陣列(FPGA)的硬件實現技術。該技術可以應用于基于矢量控制的異步電機變頻調速系統中。FPGA本身是標準的單元陣列,沒有一般的IC所具有的功能,但用戶可以根據自己的需要,通過專門的布局布線工具對其內部進行編程,在最短的時間內設計出自己的專用集成電路,從而大大地提高了產品的競爭力。由于FPGA以純硬件的方式進行并行處理,而且不占用CPU的資源,使系統可以達到很高的性能。這種設計方法應用于異步電機矢量控制變頻調速系統時,一般把電流控制作為DSP 的協處理,轉子速度和轉子磁鏈算法由DSP 主機來實現。一般情況下,位置控制比較靈活,很難做到通用性,所以位置環節一般由DSP來完成,但速度控制和電流控制具有通用性,因此可以把它們集成到一個專用芯片中。這樣,既可以實現速度控制,又可以對電流單獨控制,還可以和DSP共同構成位置控制系統。如圖1所示,若FPGA中集成有CPU內核,則可以把位置、速度、電流3種算法完全由1片FPGA來實現,從而實現真正的片上系統[1][2]。
FPGA將半定制器件邏輯集成度高的優點與標準邏輯器件開發周期短和開發成本低的優點結合在一起后,具有結構靈活、高密度、高性能、開發工具先進、編程完畢后的成品無需測試和可實時在線檢驗等優點。本文介紹的異步電動機矢量控制調速系統按照模塊化設計的基本思想,研究電流矢量控制、速度PI調節、電流 PI調節、反饋速度測量、電流磁鏈轉換、SVPWM、 Clarke變換、 Park變換和Park逆變換等幾個主要功能模塊的數字結構,并在單片Xilinx FPGA 中完成了主要模塊的布局布線,實現異步電機矢量控制速度控制器的專用集成電路[3]。
1 矢量控制的基本原理
設異步電機三相繞組(A、B、C)與二相繞組(α、β)的軸線設定如圖2所示,A相繞組軸線與α相繞組軸線重合,都是靜止坐標,分別對應的交流電流為iA、iB、iC和iα、iβ。采用磁勢分布和功率不變的絕對變換,三相交流電流在空間產生的磁勢F與二相交流電流產生的磁勢相等。即采用正交變換矩陣,則其正變換公式為:
其逆變換公式為:
由二相靜止坐標系(α,β)到二相旋轉坐標系(d-q)的變換稱為Park變換。α、β為靜止坐標系,d-q為任意角速度ω旋轉的旋轉坐標系。當α、β靜止坐標系變換為d-q旋轉坐標系時,坐標軸的設定如圖3所示。圖3中θ為α軸與d軸之間的夾角,d、q繞組在空間垂直放置,加上直流id和iq,并讓d、q坐標以同步轉速ω旋轉,則產生的磁動勢與α-β坐標系等效。d-q和α-β軸的夾角θ是一個變量,隨負載、轉速而變化,在不同的時刻有不同的值。Park變換,寫成矩陣形式,其公式如下:
矢量控制亦稱磁場定向控制,其基本思路是:模擬直流電機的控制方法進行控制,根據磁勢和功率不變的原則通過正交變換,將三相靜止坐標變換成二相靜止坐標(Clarke變換即3Φ/α-β變換,其坐標變換關系如圖2,定量關系如公式(1)),然后通過旋轉變換將二相靜止坐標變成二相旋轉坐標(Park變換,即(α-β/d-q變換,坐標變換關系如圖3,定量關系如公式(3))。在α-β/d-q變換下將定子電流矢量分解成按轉子磁場定向的2個直流分量id、iq(其中id為勵磁電流分量,iq為轉矩電流分量),并對其分別加以控制,控制id就相當于控制磁通,而控制iq就相當于控制轉矩。
2個直流分量id和iq分別由速度和電流PI調節器經電流電壓變換和Clarke逆變換(坐標變換關系如圖2,定量關系如公式(2))、Park逆變換(坐標變換關系如圖3,定量關系如式(4))和電壓空間矢量變換后,獲得控制逆變器的6路PWM信號,從而實現對異步電機的變壓變頻控制。
2 控制器的數字硬件設計
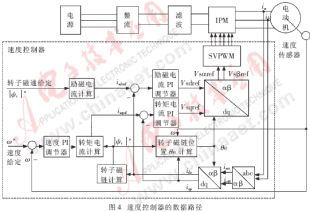
異步電機速度控制器的數字硬件設計主要包括Clarke變換、Clarke逆變換;Park變換、Park逆變換;電流PI調節模塊、速度PI調節模塊;電壓空間矢量模塊;轉子磁鏈計算模塊和速度檢測模塊等幾個不同部分。矢量控制異步電機調速系統的主電路和數據運算路徑如圖4所示。
2.1 矢量變換模塊設計
矢量變換包括相坐標以及坐標旋轉正變換和反變換,式(1)~(4)給出了相應變換的定量運算公式。其中式(1)、(2)的數字實現比較簡單,1個加法器和1個乘法器就可以完成變換運算;式(3)、(4)確定的坐標旋轉正變換和逆變換,在工程實踐中可以采用查正弦表或泰勒級數展開的方式進行計算,從而完成相應的功能。
2.2 PI調節器模塊設計
電流內環和速度外環都是按PI控制策略進行調節的,式(5)為雙線性變換PI調節器的迭代公式。
式中E[n]為誤差輸入,Kp為比例增益,Kh為積分增益,Kp和Kh的范圍由電機參數決定,并且需要通過實驗來確定其具體值。為防止溢出,調節器設置了飽和限制。電流PI調節器輸出的是電壓指令,以調制系數的形式經過補償后送給SVPWM模塊;速度PI調節器輸出的是參考電流指令,直接送給電流調節器。不管是電流調節器還是速度調節器,如果參考指令值比較大,其積分器就有可能會建立起一個很大的誤差值,并且由于積分器的慣性作用,這個誤差會一直保持較長時間,從而將導致過大的超調。因此在設計PI調節器時,應當在積分器的輸出超過限定值時立即關閉積分作用,以減少過度超調的影響。
2.3 M/T法測速模塊設計
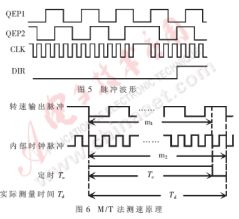
基于轉子磁場定向的異步電機矢量控制變頻調速控制器的關鍵問題是轉子位置及反饋速度的測量。本方案采用增量式光電碼盤及霍爾元件作為位置檢測器件,在上電復位時由霍爾元件粗略檢測電機轉子的初始位置進行軟啟動,當碼盤的Z脈沖出現后就可以得到精確的位置信息。位置計數則按碼盤的2個正交輸出脈沖QEP1和QEP2的4倍頻進行,其脈沖波形如圖5所示。轉速是利用M/T法進行測量的。M/T法是在M法的基礎上吸取T法的優點,其測量轉速的過程為:在轉速輸出脈沖的下降沿啟動定時器(定時長度為Tc),同時記錄轉速輸出脈沖個數ml和時鐘脈沖個數m2。測量時間到,先停止對轉速輸出脈沖個數的計數,待下一個轉速輸出脈沖下降沿到來時,再停止對時鐘脈沖計數,以保證測到整個轉速傳感器的輸出脈沖。所設的基本測量時間Tc可避免T法因轉速高導致測量時間減小的缺點;同時讀取對時鐘脈沖的計數值可避免M法因轉速降低導致精度變差的缺點。其測量時間為:
(8)式中的m1值不再可能有1個脈沖的誤差,故M/T法的測量誤差只可能因計數m2值存在一個脈沖的誤差引起,其相對誤差為 ,其測速原理如圖6所示。
,其測速原理如圖6所示。
2.4 電壓空間矢量模塊設計
電壓空間矢量脈寬調制法也稱磁鏈追蹤型PWM法,該方法把電動機與逆變器看為一體,側重于以電動機獲得幅值恒定的圓形磁場為目標,以三相對稱正弦電壓供電時交流電動機中的理想磁鏈為基準,用逆變器不同的開關模式所產生的磁鏈有效矢量來逼近基準圓。理論分析和實驗表明SVPWM調制的脈動轉矩小,噪音低和直流電壓利用率高(比普通的SPWM調制約高15%)。這種控制方法在變頻器、逆變器中得到了廣泛的應用。電壓空間矢量結構框圖如圖7所示。

圖中對稱/不對稱波形發生器、輸出邏輯電路、空間矢量狀態機的合成由比較控制寄存器的相應位進行控制,具體工作原理可參見文獻[5]、[6]。
除了上述主要模塊外,還有通信模塊、寄存器堆以及監控和保護等輔助性模塊,其中通信模塊主要用來與DSP或主機交換數據(見圖1)。所有這些模塊構成了一個完整的速度隨動控制器,并在1片FPGA中實現。
3 硬件設計的FPGA實現與實驗結果
基于矢量控制的高性能異步電機速度控制器設計電路中的所有模塊均用硬件語言VHDL進行描述。在源代碼通過功能仿真與時序仿真測試后,再經過 SynPlify軟件綜合生成EDF網表文件,最后在Xilinx的FPGA(SpartanⅡE一XC2S300E)器件中實現,其中器件的布局和布線在Xilinx集成開發環境ISE5.li中完成。系統資源利用情況如表1所示,整個設計消耗的等效門數約為350 000,基本接近飽和。若考慮到將來的功能擴展,則需要容量更大的芯片,但現有設計可重復利用,無需作較大的修改[7]。

本設計中異步電機速度控制器IC系統的時鐘頻率可以運行在33.33MHz下,并且可以通過上位機訪問內部寄存器來設置控制系統中的各種有關參數。這種IC芯片既可以與TMS320L2812 DSP及其他電路共同構成一個完整的系統來實現位置隨動控制,也可以單獨構成速度隨動控制系統。
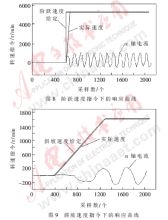
在測試速度控制器性能的實驗中,驅動對象是一臺最高轉速為4 900r/min、編碼器線數為4 900的1.5kW的異步電動機,且開關頻率與采樣頻率均設為12kHz。圖8和圖9所示的是在不同轉速指令下所測得的電動機轉子速度跟蹤曲線和α軸電流響應曲線。圖8中的轉速指令為從0~1168r/min的階躍輸入,動態響應時間不到0.5ms,最大超調量低于0.8%,穩態誤差小于0.02%;圖9中的轉速指令為斜坡輸入,加速度為0.42 r/min/采樣,目標速度為495r/min,動態跟蹤誤差在4%以內,穩態誤差約為0.03%。若進一步提高開關頻率和采樣頻率,則控制系統的運行性能將會更加優良[8]。
單片集成、混合集成和系統集成可看成是電力電子集成的不同層次和形式,現階段單片集成局限于小功率范圍;中功率領域多采用混合集成或混合集成與系統集成相結合的形式;大功率領域仍以系統集成為主。單片集成和混合集成由于具有更高的集成度和更好的性能,因此是未來集成技術的主要發展方向[9]。
本文所設計的基于FPGA的異步電機變頻調速專用IC,內部集成了Clarke變換、Park 變換、Park逆變換、速度PI調節、電流d軸PI調節、電流q軸PI調節、對轉子磁鏈定位和速度檢測、電壓空間矢量脈寬調制及PWM波形發生等算法,速度外環和電流內環的采樣頻率分別可以達到35kHz和20kHz。實驗結果表明,該專用控制器在運行時有著良好的動、靜態性能。該專用IC已經在高性能集成數控系統中獲得應用,并取得了很好的實踐效果,對研制具有自主知識產權的矢量控制異步電機變頻調速專用芯片有著十分重要的參考價值。
參考文獻
1 Huy H L.Microprocessors and Digital IC′s for Motion Control.Proc IEEE,1994;82(8)
2 Holtz J.Pulse Width Modulation-A Survey.IEEE Trans Ind Electron,1992;39(5)
3 Oldfield J V,Dorf R C.Field Programmable Gate Arrays.New York:Wiley,1995
4 Jenkins J H.Designing with FPGA′s and CPLD′s.Englewood Cliffs,NJ:Prentice-Hall,1994
5 Broeck H W V,Skudelny H,Stanke G V.Analysis and Rea-lization of a Pulsewidth Modulator Based on Voltage SpaceVector.IEEE Trans Ind Applicat,1988;24(1)
6 劉和平,嚴利平,張學鋒等.TMS320LF240X DSP結構、原理及應用.北京:北京航空航天大學出版社,2002
7 Morimoto M,Sato S,Sumito K et al.Single-Chip Microcom-puter Control of the Inverter by the Magnetic Flux Control PWM Method.IEEE Trans Ind Electron,1989;36(1)
8 周兆勇,李鐵才.基于矢量控制的高性能交流電機速度伺服控制器的FPGA實現.中國電機工程學報,2004;24(5)
9 王兆安,楊旭,王曉寶.電力電子集成技術的現狀及發展方向.電力電子技術,2003;37(5)